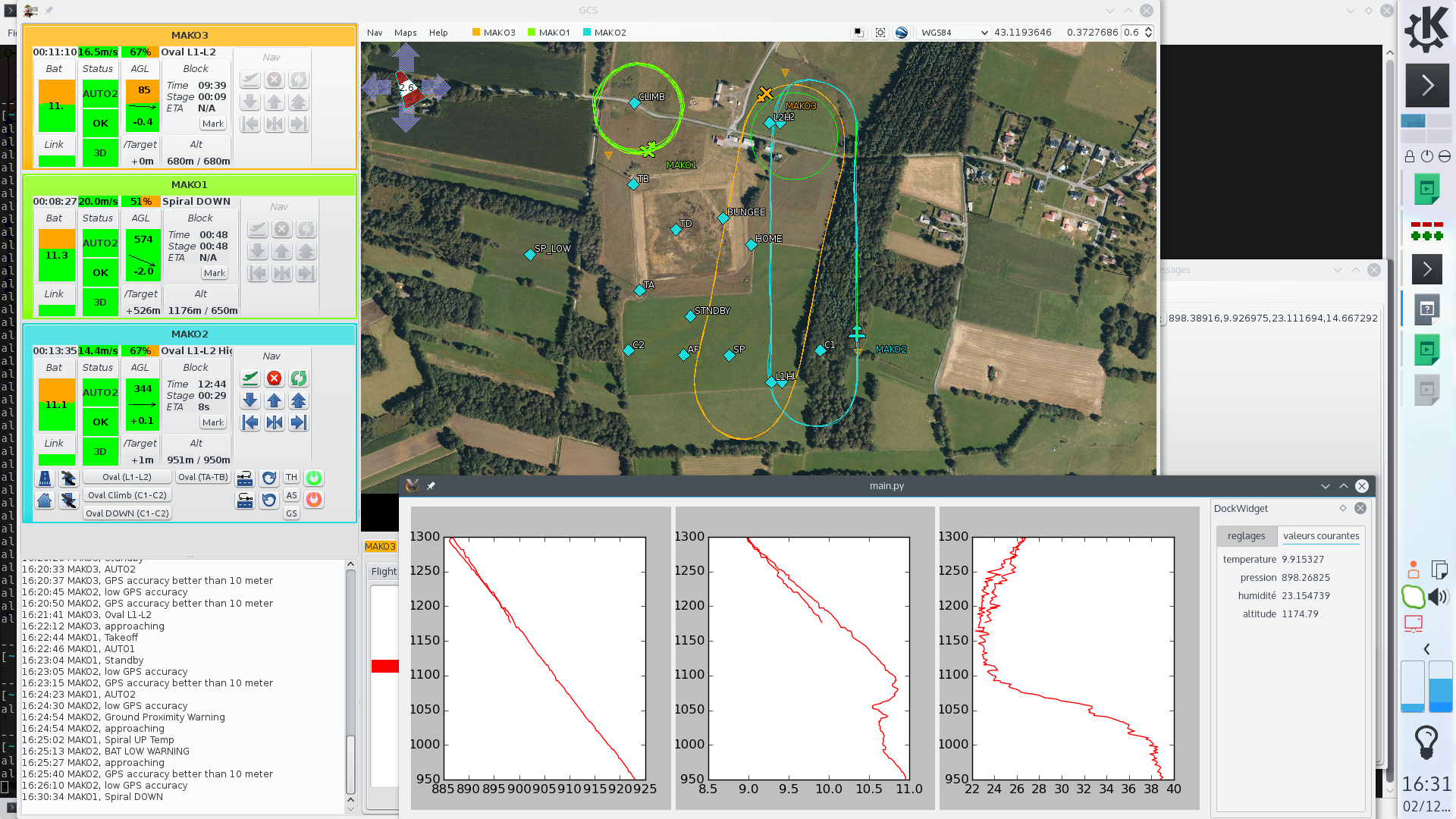
ENAC UAV Lab team and Meteo-France (CNRS-GAME and ENM) teams have spent several days at the Atmospheric Research Center of Lannemezan (in the south of France) in order to perform experiments for simultaneous meteorological measurements through multi-UAV flight.
This was part of a research project called VOLTIGE aimed at studying the formation of cloud and fog events. One of the planes is measuring the turbulence near the ground, a second plane is flying above the cloud or the fog with a radiation sensor and the last one is making a vertical profile of temperature, pressure and humidity up to 1500 meters AGL.
All the planes were controlled by Paparazzi UAV Apogee boards, with on-board logging on SD cards and navigation patterns triggered by sensors readings.
After many months of hard work we have finally reached a version of Lisa/M that is ready for a wider range of developers. Although there are still some things missing that would allow a beginning user to use it with ease, we decided it is better to provide it to all of the other brilliant non core developers and users. You can find out more about it in the Paparazzi Wiki. A big thanks go to OpenUAS for his great help with the documentation.
And before you start asking, it is not fully Open-Hardware YET! The schematics are available in the SVN as well as in the Wiki. The eagle board layout files will follow soon.
Let us know what you plan to build with this autopilot. Also if you have built an aircraft with Lisa/L or Aspirin we would be very happy to see them. Just drop a comment below with a link to a picture. Let’s spread the word of what is possible with Paparazzi!!!
As promised, we want to talk about projects we are currently working on. One of them is Lisa/M.
Lisa/M will be the medium sized Autopilot based on the STM32 Cortex-M3 microcontroller. It is part of the Lisa series of Autopilots. It is very small (50mm x 25mm), about the size of an RC receiver. We want it to be as affordable as possible so that more people can join the autonomous aircraft revolution. The final cost still needs to be determined, as we are not done with the development yet.
Due to its large capabilities and small size, it can be used as a full Autopilot for fixed wing airplanes, multicopters and helicopters, as well as an IO extender/repeater (in which case the IMU can be left out, cutting the cost significantly).
One other interesting feature is that it can host the SMD mounted Aspirin IMU without adding size. The Aspirin IMU is the next generation small, flat, low part count and cheap IMU that will get an article by itself.
Lisa/M with mounted IMU has the following sensors on board:
3 Axis Gyroscope
3 Axis Accelerometer
3 Axis Magnetometer
Pressure sensor
The pressure sensor is mounted directly on Lisa/M as this sensor is not provided by Aspirin. Without a GPS unit you have all necessary sensors for full attitude and altitude stabilization in an extremely small package (if you know of a smaller one, let us know!). With an external GPS unit, it is a full fledged Autopilot.
Now you may ask when will it be available for prime time. We can’t give you a definite answer just yet. What we definitely can say is that it will be as soon as it is ready. 🙂
But now seriously. We are currently working on the second revision of our prototypes. Based on our experience it takes 3 to 4 revisions of a hardware design to get it right. That means in a few months if everything goes well.
Don’t lose faith though. The first design was already good enough to be able to fly an airplane. That means that there are no major mistakes in the design.
We will of course keep you up to date on this projects progress in future articles.
Paparazzi features adaptive control loops that can cope with substantial “changes” of the airframe in flight. May it be a motor dropout, partial loss of control surfaces or dropping a heavy payload. As videos usually say more than words, here are two that demonstrate this.
The first video shows Paparazzi’s adaptive control loops (written by Pascal Brisset and Gautier Hattenberger at ENAC) for fixedwing aircraft keeping a Multiplex Twinstar on track, despite dropping a portion of the right wing and aileron and then switching the right motor off.
Martin Mueller equipped the Twinstar with video cameras to document this. You can easily see that after part of the right wing is dropped the adaptive controller compensates for this automatically although only 50% of the aileron control surface remains. To make things even worse, the motor on the same side was switched off to simulate engine failure but the autopilot manages to keep it stable. At that point the aircraft became virtually impossible to fly by the very skilled safety pilot in manual control.
Although the adaptive vertical control for multicopters (by Antoine Drouin at ENAC) has been around for almost two years now, here is a demo of a Paparazzi Booz quadrotor suddenly dropping 50% off its weight.
In this case, a Kalman filter of dimension one is used to estimate the the ratio of vertical acceleration over the produced thrust. This basically equates to the inverse of the mass during flight. Then the inverted dynamic model is used to issue a nominal thrust command based on this estimate. With this the quadrotor is able to stay very near same height, whereas with standard feedback control loops it would “go through the roof” when the payload is suddenly dropped.
Many Paparazzi followers will be familiar with the popular TINY and TWOG fixed wing autopilot boards that have allowed so many UAV pilots their first taste of autonomous flight. A few will even have had the pleasure of using the Booz multicopter autopilot board. All three of these designs are based on the Phillips LPC2148 microcontroller, which has proven to be a solid performer in this role. Antoine Drouin, the genius behind the Booz board, has once again outdone himself with a completely new series of autopilot boards based on the STM32 ARM Cortex-M3 microcontroller, which has the umbrella name Lisa. The first available is the Lisa/L and it is this board that will be explored in coming articles.
In the case of Lisa/L the 64 pin STM32F103RE processor has 64k of RAM, 512k of FLASH and runs at 72Mhz. To ensure that future autopilot features are not restricted by board design, Antoine has ensured that all of the processor’s pins are exposed on Molex PicoBlade connectors. This allows access to all of the available peripherals, which include 3 USARTS, 2 SPI, 2 I2C, 1 CAN and 3 ADC channels and many more.
The board also provides an interface which is both electronically and mechanically compatible with that of the Gumstix Overo, providing the option of running autopilot code (and any other applcations) under Embedded Linux on an Overo with the STM32 acting as an I/O processor.
Lisa/L showing Gumstix Overo connector
The board is equipped with a pair of pressure sensors, one absolute to measure altitude and one differential to measure airspeed. Additionally, Lisa/L is fully compatible with the BOOZ IMU module which can be conveniently mounted above the Lisa/L board.
The addition of further sensors and external peripherals like modems, servos, USB webcams or wifi sticks is facilitated through the inclusion of three different power supplies (5V for external peripherals, 3V3 for avionics and a linear supply to provide clean power to sensitive sensors).
For the first time in a Paparazzi autopilot board, a USB based JTAG interface to the STM32 has been incorporated. This high speed interface allows for both fast programming and run time debugging using GDB. Debugging doesn’t get any easier :). If the Gumstix module is mounted, this USB interface also provides the serial console.
Even from these few short paragraphs, it should be apparent that Lisa/L has been designed with power and flexibility in mind. This has already demonstrated with the flight of both quadrocopters, hexacopters and fixed wing aircraft utilising very different sensor suites (such as the Paparazzi Booz IMU and Paparazzi IR sensors ).
For those that can’t wait until next time the Lisa/L Gallery is a must see.
In the upcoming articles we will explore the features of Lisa/L further.
Until next time… Your Paparazzi Team
Research and development of open-source UAV systems since 2003