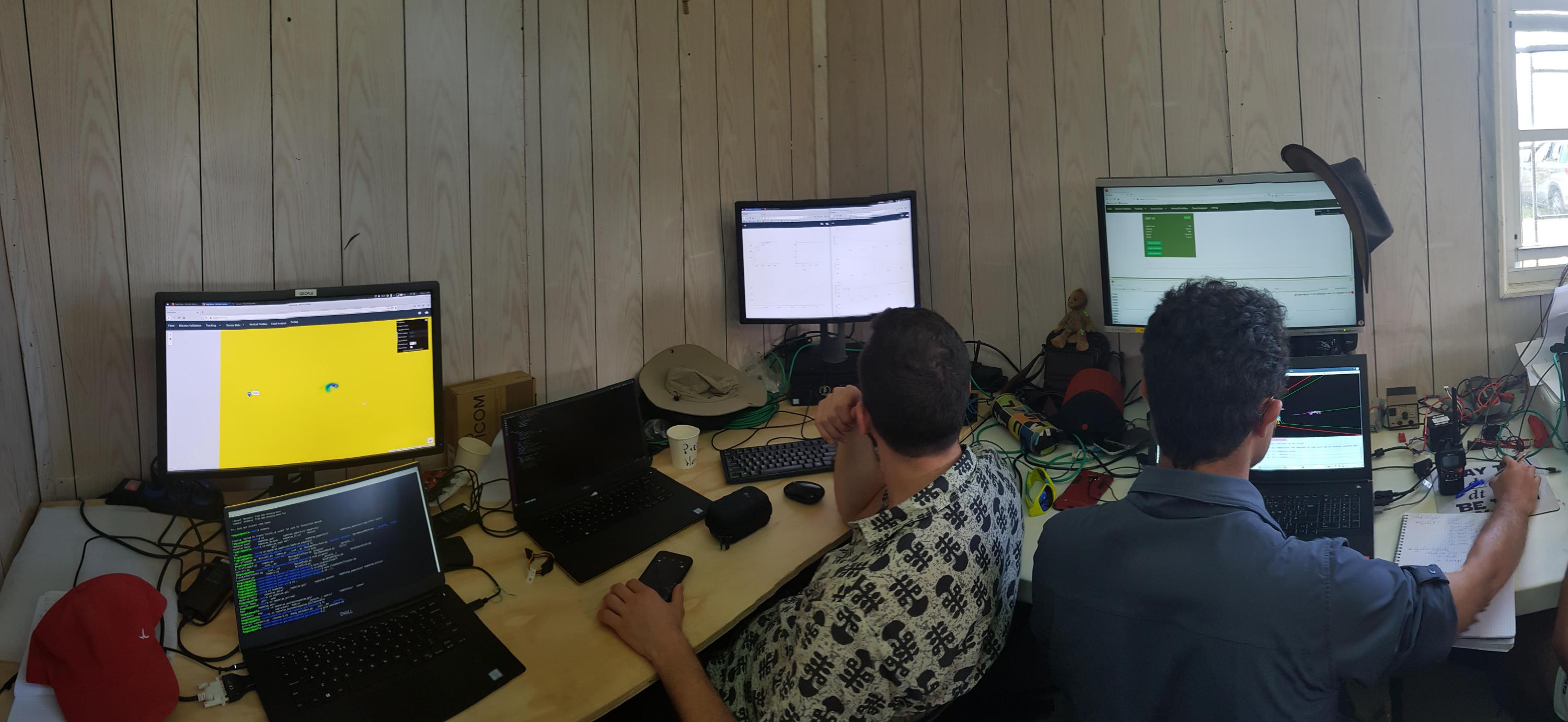
Enac UAV lab have participated to an atmospheric research flight campaign at the Barbados Island for three weeks from end of January 2020. 
This was part of a project called NEPHELAE in collaboration with the French National Meteorological Research Center from Météo-France and the robotics lab LAAS-CNRS.

NEPHELAE is atmospheric science driven (with a focus on cloud microphysical processes) via robotic technological development (adaptive, model-guided path planning in a UAV fleet). Essentially, by merging the state-of-the-art technology, the observational tools for conducting research in atmospheric science will take a quantum leap forward. At the same time, we are using this novel approach to address decades-old questions on entrainment and the onset of precipitation that have been limited by traditional observing methods.

The UAVs that have be deployed during a field campaign (Skywalker X10) in Barbados Island are capable of detecting the edges of the clouds and react to adapt their trajectory. Several patterns have been developped in collaboration with the atmospheric scientists. Each of them is dedicated to extract certain parameters at the core of the cloud or at the interface between the free atmosphere and the cloud.
In total, more than 30 operations with one or two UAVs have been done, for a flight time of almost 38 hours.