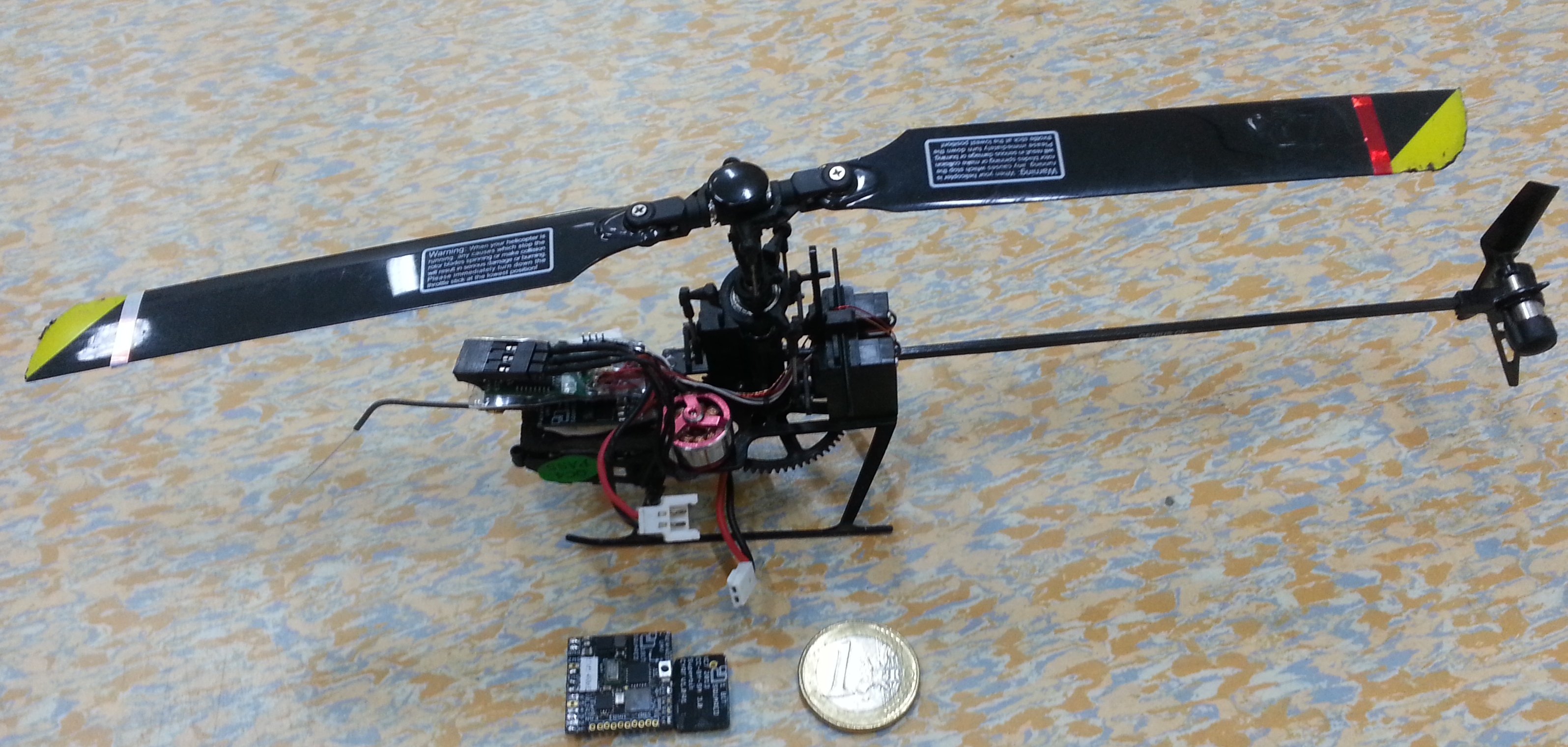
Our friends at the TU-Delft MAVLab have made a video showing Lisa/S flying on a Quadrocopter and Helicopter. In the video you can see the Paparazzi UAV software compiled for Lisa/S stabilize and control the aircraft. It is using the SuperbitRF module to receive control commands from a Spektrum RC transmitter. All the necessary software is integrated into the master software branch of Paparazzi.
Monthly Archives: August 2013
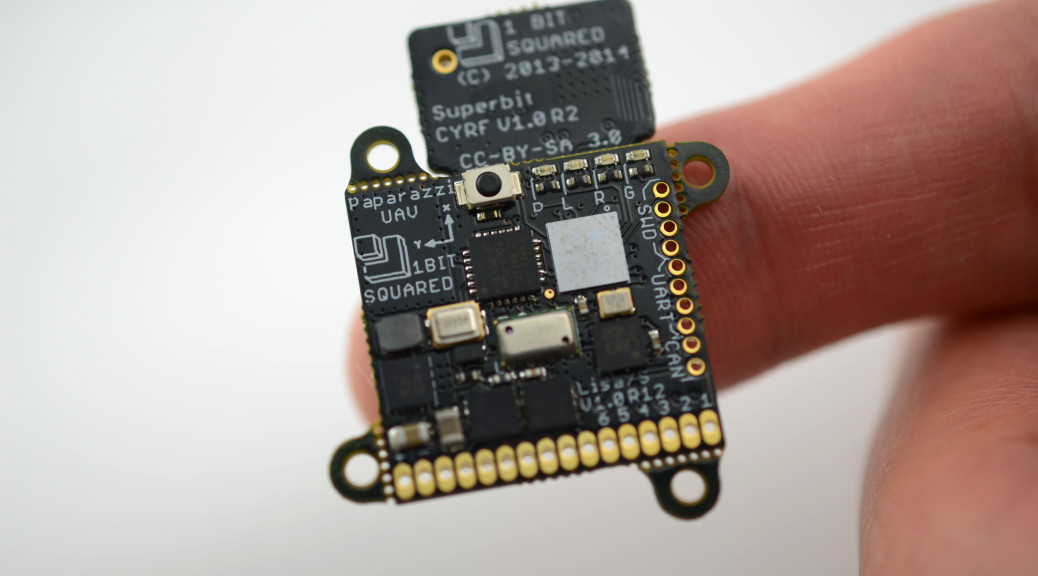
Lisa/S The Worlds Smallest UAV Autopilot
 TU Delft researchers in collaboration with 1BitSquared have designed and build the world’s smallest autopilot for micro aircraft.
TU Delft researchers in collaboration with 1BitSquared have designed and build the world’s smallest autopilot for micro aircraft.
Researcher Bart Remes and his team of the Micro Aerial Vehicle Laboratory at the TU Delft faculty of Aerospace Engineering in a collaboration with Piotr Esden-Tempski from 1BitSquared have designed, built and tested the world’s smallest open source autopilot for small unmanned aircraft. A smaller – and lighter – autopilot allows these small flying robots to fly longer, fit into narrower spaces or carry more payloads, such as cameras. That makes them more suitable to be used in rescue operations for example. Remes: “Our aim? Make MAVs so small and light that every fireman can fit one in his pocket.”
More information:
Hardware electronics will be sold by (from January 2014 onward) 1BitSquared

Antarctica Meteo Missions 2013
 Over the last 9 weeks the Paparazzi autopilot has been used for operations with remotely piloted aircraft from the Finnish Meteorological Institute for scientific research on board the R.V. Polarstern in the Weddell Sea/Antarctica. You can see the course and read a short report on the homepage of the Alfred Wegener Institut.
Over the last 9 weeks the Paparazzi autopilot has been used for operations with remotely piloted aircraft from the Finnish Meteorological Institute for scientific research on board the R.V. Polarstern in the Weddell Sea/Antarctica. You can see the course and read a short report on the homepage of the Alfred Wegener Institut.
Instructions on how to build your own small unmanned meteorological observer (SUMO) can be found here in the Wiki.
Lisa/S V0.1 Design
Lisa/S nano autopilot V0.1 PCB Layout video – 6 months of work in 3 minutes.
Designing new hardware takes time. Laying out a board is only part of the challenge. A lot of work goes into research about the parts and circuits to use. In the following video you can see how the whole engineering effort concludes into the final design of the board. Even though the time lapse shows only 7 hours and 48 minutes of layout work, it was spread over 6 months of engineering effort.