 Since there are many Windows users who like to try paparazzi on this popular OS and Microsoft introduced the possibility of running Ubuntu programs and tools on windows 10, now Paparazzi developer team is pleased to announce the initial release of the Windows10 support of Paparazzi.
Since there are many Windows users who like to try paparazzi on this popular OS and Microsoft introduced the possibility of running Ubuntu programs and tools on windows 10, now Paparazzi developer team is pleased to announce the initial release of the Windows10 support of Paparazzi.
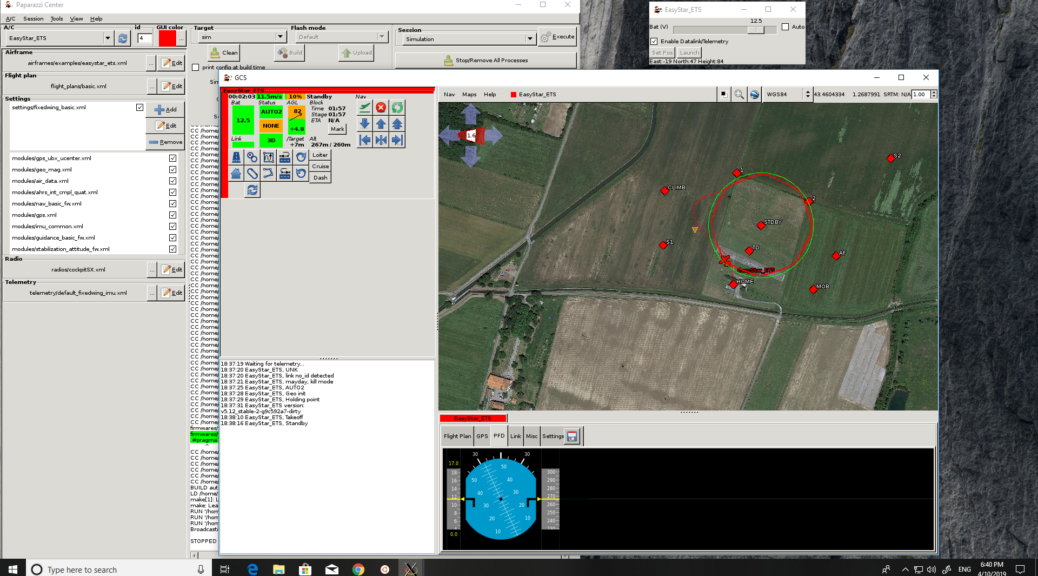
The installation process is not so much different from the Linux, but you need some extra steps to install Ubuntu, and some more for using graphical interface and connecting to the aircraft via telemetry. This first release still retains the look and feel of its Linux sibling as currently it uses X Windows for rendering, so you need to install X server in order to have graphical interface.
Although its still on developing and you need some extra work to communicate with serial port, or stop process manually, … .But maybe it is better you install it yourself and give us the feedback, or if you can help to make it better, we will be happy!
Don’t hesitate to go through the wiki install page for Paparazzi on Windows 10 (thanks to Iman Shidareh).