Rich Burton of Hooperfly made a video showcasing the flexibility and accuracy of the PaparazziUAV system running on the
1BitSquared Lisa/MX autopilot.
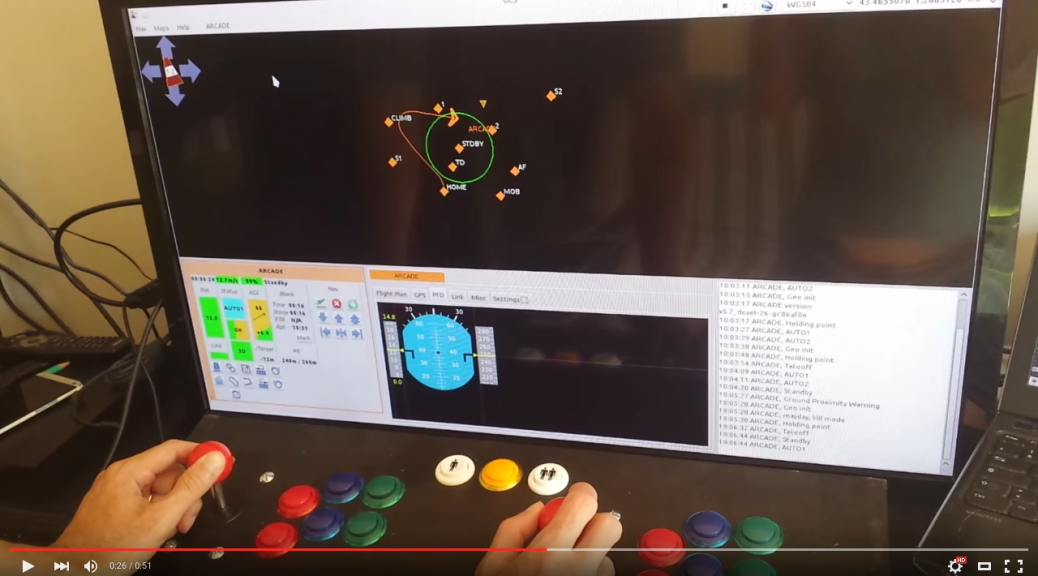
Using Paparazzi’s flight plan software to dictate a pattern of waypoints for three of his TeensyFly MAV’s to take off autonomously, hover, fly a rectangular pattern, hover and land. All the flight plan blocks are triggered in unison with a custom papget xml config file. The unison nature of their flight is quite beautiful to behold.
And a behind the scenes clip of a flying robot getting a little help from a friend. 🙂