
As many of you know a programmer and debugger is a tremendously useful tool for many Paparazzi UAV based autopilots like the Lisa/MX and Lisa/S.
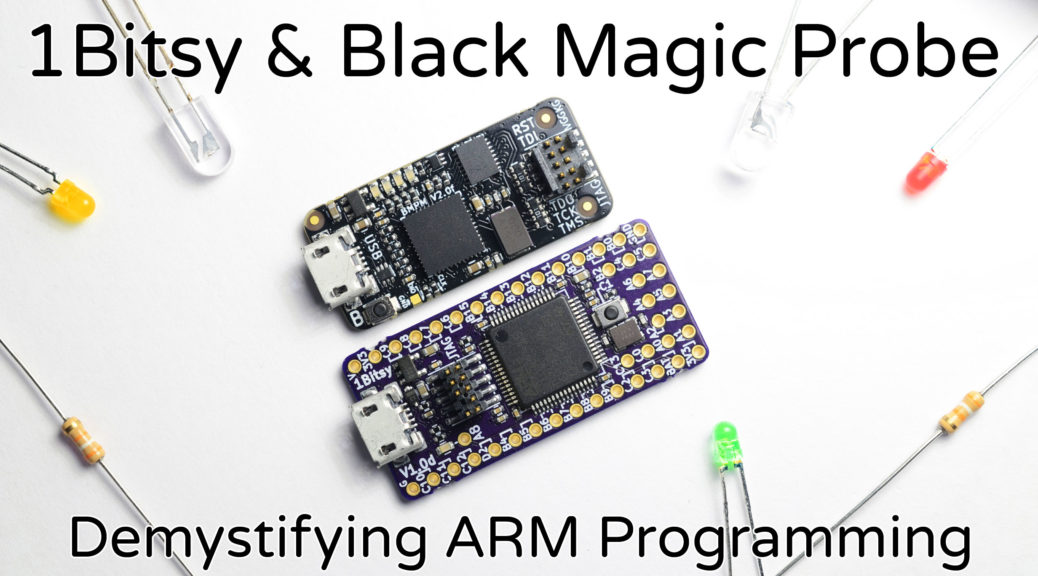
Our friends at 1BitSquared are running a Kickstarter to make a new revision of their Black Magic Probe JTAG SWD debugger and programmer with the addition of the 1Bitsy. 1Bitsy is a development board using the same CPU as Elle0 and Lisa/MX Paparazzi autopilots. It can serve as a good prototyping platform for payload control or for your next autopilot project.
Every hobbyist and hardware enthusiast will find these boards to be an indispensable part of their tool kit. Check out their campaign and spread the word! 😀