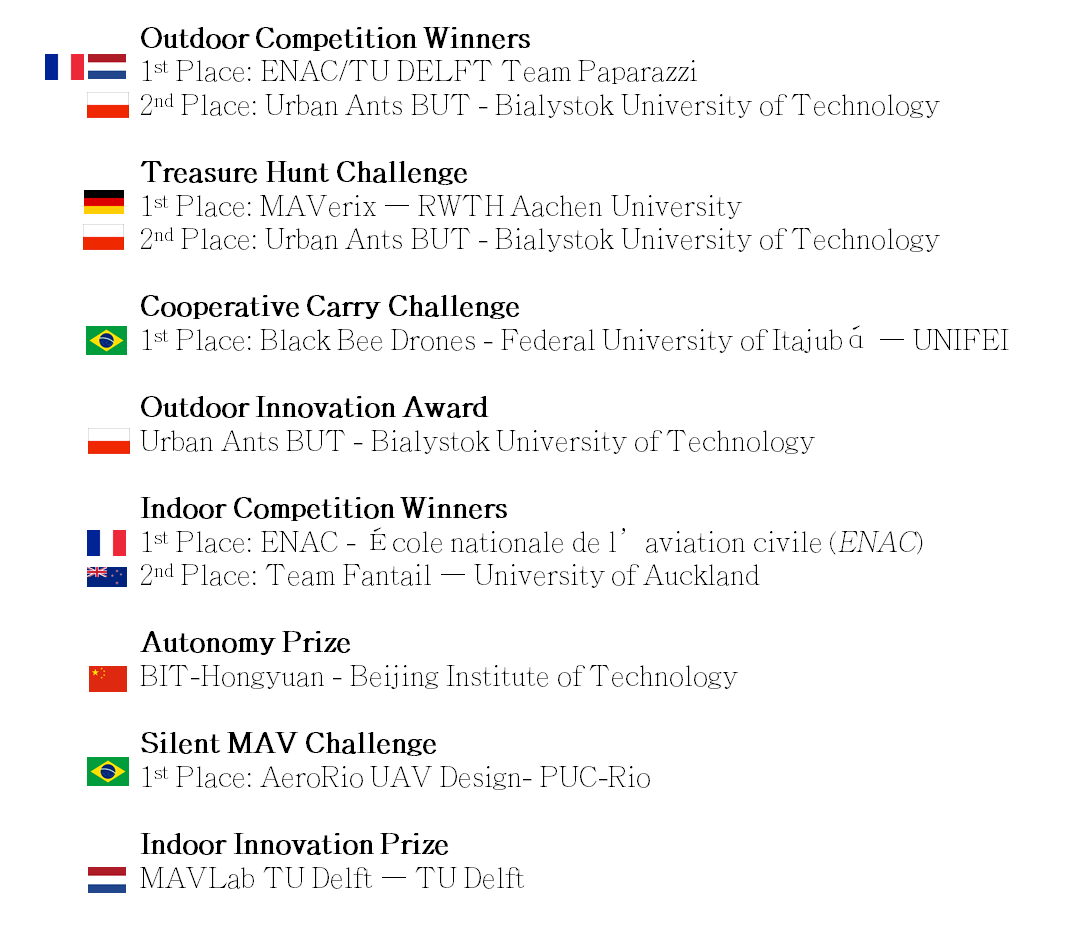
The MavLab team of TU Delft consisted of 12 people coming from aerospace, computer science, embedded programming and artificial intelligence. Thanks to the enormous team efforts in the last months, the team has won prizes in all the categories in which it participated at IMAV 2013 in Toulouse, France:
The MavLab team of TU Delft consisted of 12 people coming from aerospace, computer science, embedded programming and artificial intelligence. Thanks to the enormous team efforts in the last months, the team has won prizes in all the categories in which it participated at IMAV 2013 in Toulouse, France:
Outdoor: 1st place
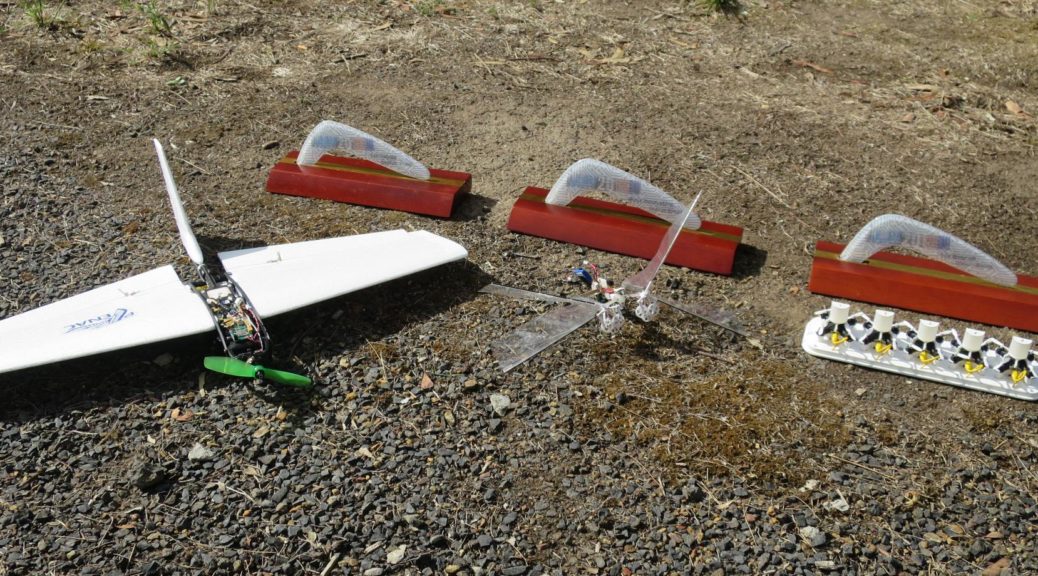
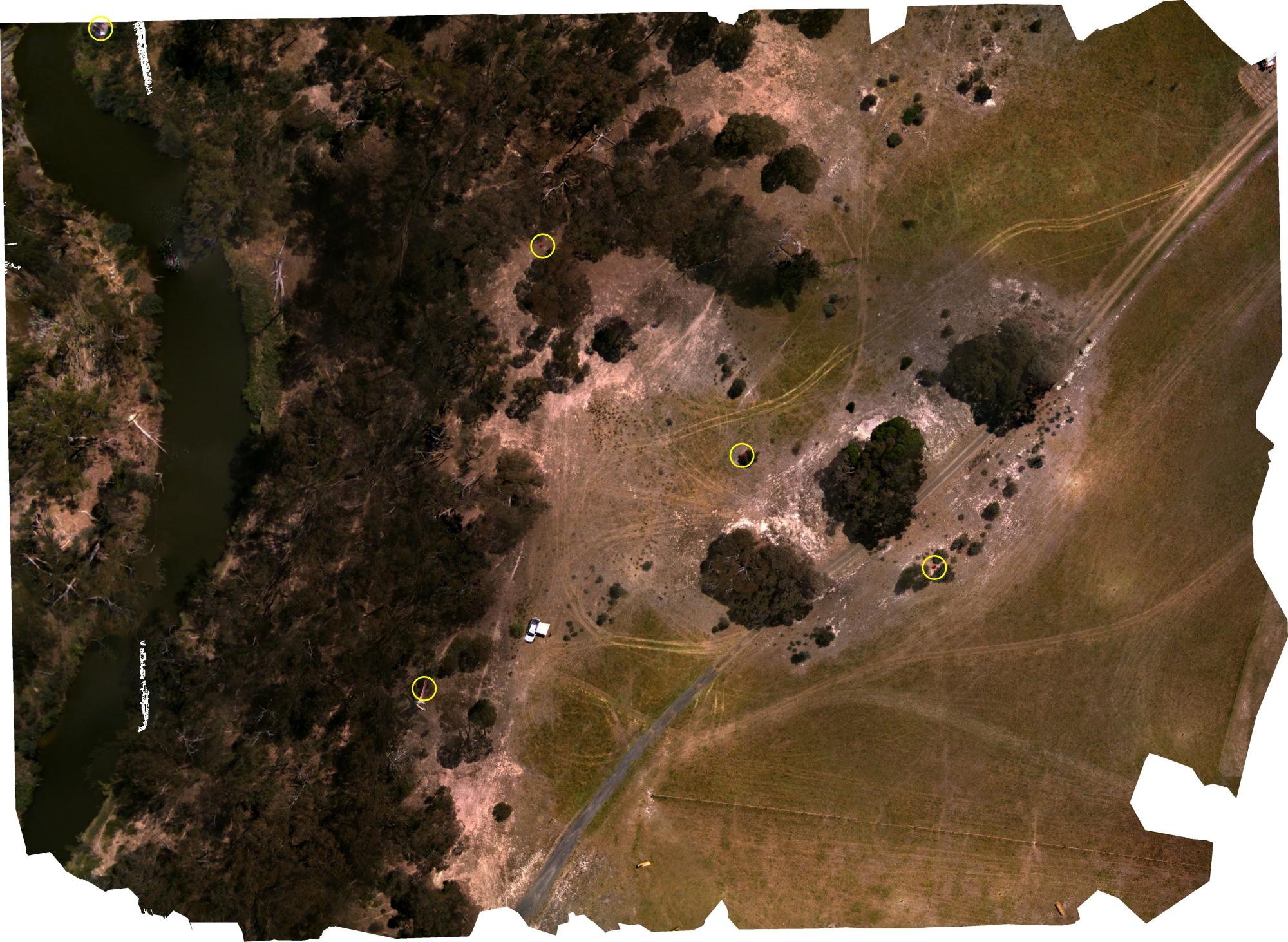
With an autonomous swarm of 12 MAVs operated by a single operator. The MAVs only had to be plugged in and started with their own flight plan, while the operator could monitor their mission status and intervene where necessary. Our participation featured four main innovations: (1) a single operator for 12 MAVs, 3 hybrid UAVs, 7 Parrot AR drones and 2 mini-quadrotors, (2) onboard vision processing on the AR drone with Paparazzi, (3) hybrid UAVs able to fly under any attitude, and (4) the world’s smallest open source autopilot, Lisa/S (2 grams). The wind conditions were terrible on the outdoor competition day, with 6 Bft, and most teams had their MAVs blown away. Everybody was impressed with how the hybrid UAVs were able to cope nicely with these conditions and were still able to perform a precision landing.
Indoor Operations: 1st place
Indoor Autonomy: 3rd place
Indoor the mission consisted of elements such as flying through a window and obstacle zone. We were the only participants to use a flapping wing MAV, which was in size and weight by far the smallest competing MAV (28 cm wing span, 20g). We demonstrated some autonomous flight capabilities such as autonomous takeoff (a world’s first), and the capabilities of the DelFly as a First Person View-platform, where the operator flies the MAV on the basis of its onboard images. All elements were performed by the operator. Many thanks to ENAC for organizing the event in Toulouse.