…since anyone took the time to post here.
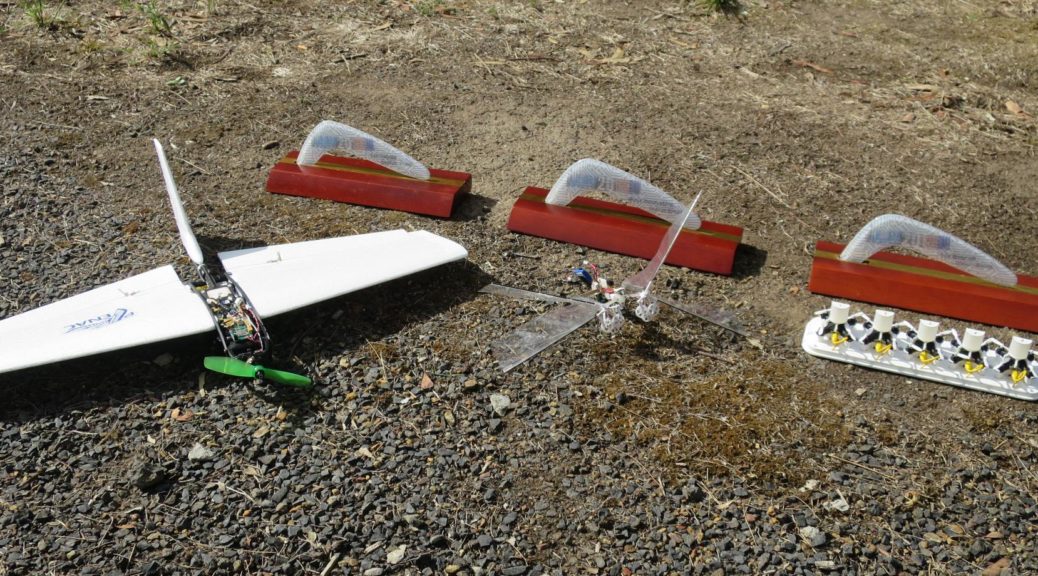
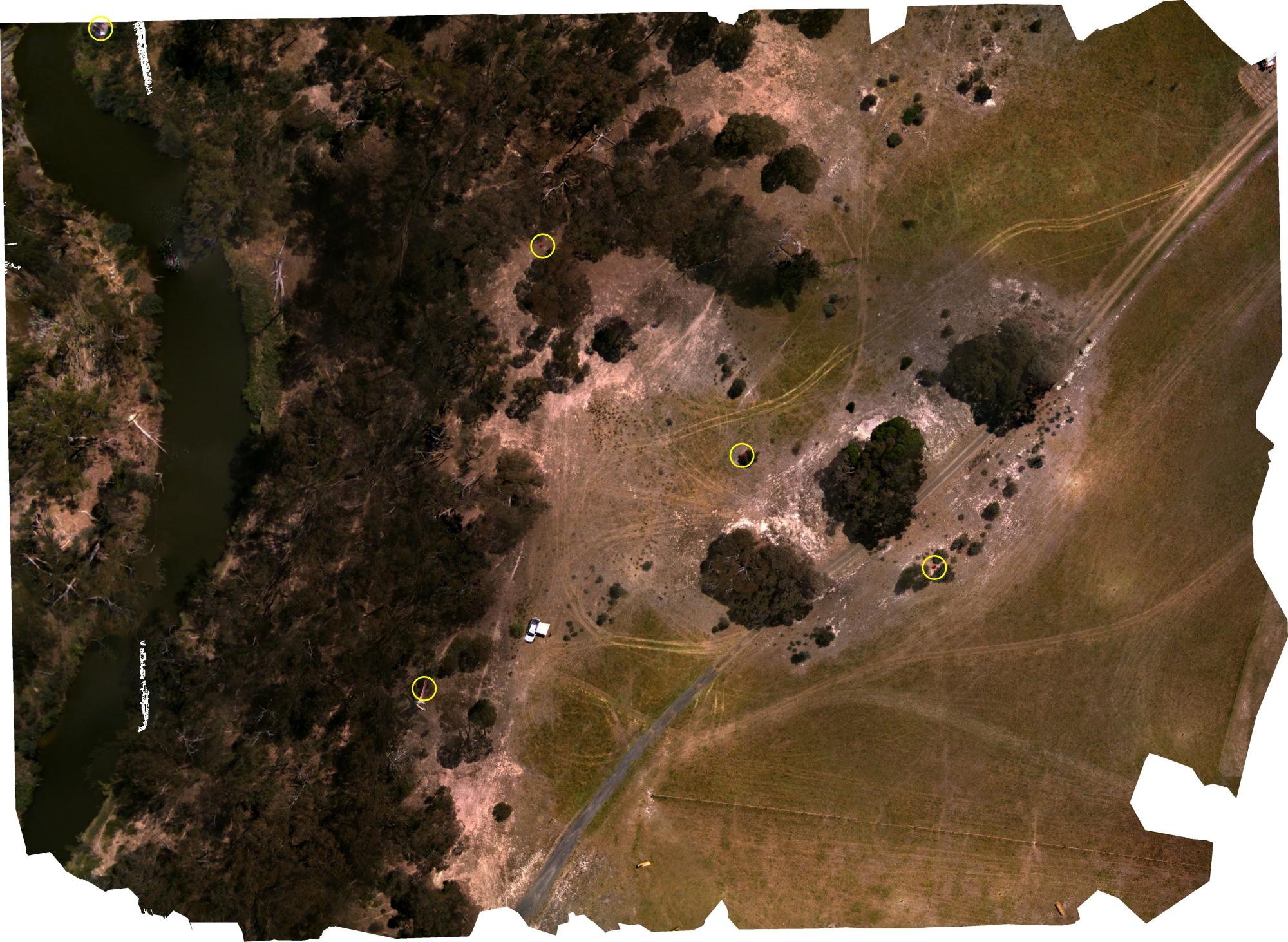
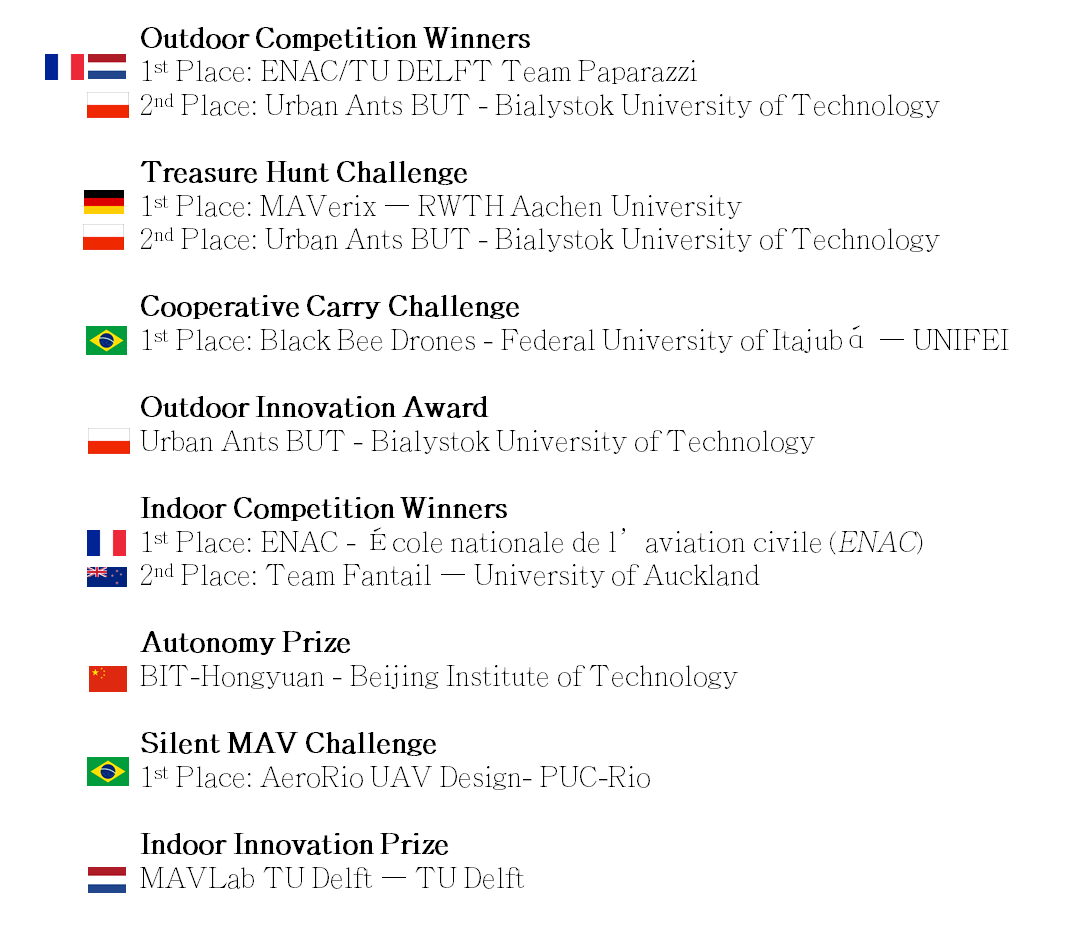
Paparazzi is still there. We have a new stable version (https://github.com/paparazzi/paparazzi/releases/tag/v7.0.0_stable), many projects on VTOL and swarms, several awards at IMAV competitions.
Hopefully, we’ll spend more time to give news.
In the meantime, see you at the next IMAV in Strasbourg, France.