The Cyfoam is a hybrid vehicle developed at ENAC Drone Lab. The aircraft is a foam, with a 3D printed fuselage, version of the composite-made Cyclone.
The vehicle is powered by the new autopilot board Chimera! which executes the control algorithms developed by Ewoud from Delft MAV Lab. We are currently aiming at a total autonomous mode, e.g., auto take off and auto landing.
The Disco from Parrot is a fixed-wing aircraft designed for FPV with all the feature already available on their Bebop2, plus some extra things, like airspeed sensor, SBUS input and PWM outputs.
The autopilot itself is all integrated in a box called C.H.U.C.K. and it allows nice and easy flights with the SkyController2 and the Cockpitglasses, connected via Wifi.
Just like the Bebop and ARDrones, it is now possible to fly this drone using Paparazzi. Just connect to the plane, upload your code and you’re ready to go! Here is the video of the maiden flight:
Special thanks to ArduPilot and Andrew Tridgell who implemented the driver for PWM output on this plane and his tips for debugging the Paparazzi version.
We have recently developed and tested a formation control algorithm for fixed-wing aircraft in Paparazzi at ENAC. The position of an arbitrary number of vehicles can be controlled in a circular path. In fact, we are not restricting ourselves to circles but to any closed orbit, such as ellipses, thanks to the guidance vector field that guides the planes.
The algorithm is under more tests, but it should be soon available for the general public. It is quite easy to employ, the user has to declare only the IDs of the planes, the communication topology (neighbors’ relationships) and the desired inter-angles. A detailed explanation will be posted soon in the wiki.
In the following video the planes exchange positions every second. Delays, out-of-date positions (GPS delays), packet losses, etc are expected to be (and actually they are) present. It is quite interesting to remark how robust the algorithm is. According to our calculations the impact of such nasty things are not very important (ofc up to a certain point) for the convergence of the algorithm.
In total 3 planes are used for the scientific measurements and an extra one for aerial footage of the other planes. They are all using Apogee boards with an extra sensor board developed in-house at Enac: the MeteoStick.
DELFTACOPTER, an electric, long range, transitioning autonomous delta-wing helicopter, is on a mission. What mission? In this case, it’s the 2016 Outback Medical Express challenge and the MAVLab Team at TUDelft has high hopes for their hybrid aircraft.
This year’s Outback Medical Express mission requires a UAV to pick up and bring back a blood sample of an ill-fated person called “Outback Joe” located at an inaccessible roughly known location 30 kilometer away remote location with unknown terrain.
Powered by PaparazziUAV, the DELFTACOPTER is also equipped with state of the art on-board stereoscopic wide field of view computer vision.
Property description
Value
Flight
Cruise speed
45 knots at 300 watt
Most efficient speed
35 knots at 230 watt
Maximum speed
50 knots
Physical
Weight
4kg
MTOW
4,5kg
Wing area
0,496 m2
Wing loading
8kg/m2
Span
1,54m
Length
0,6 m
Height
0,4m
Energy
Power usage in hover
280 watt
Main battery energy
10000mAh ~ 225 Wh
FTS battery energy
250mAh ~ 2Wh
RPM in forward flight
450 rpm
RPM in hovering flight
1550 rpm
Datalink
Datalink 1 protocol
Iridium satellite communication
Datalink 1 range
Global
Datalink 2 protocol
900 MHZ long range communication
Datalink 2 range
40km
Weather properties
Maximum wind speed
30kts
Maximum precipitation
Light rain
All the best to the MAVLab Team and their DELFTACOPTER during their Outback Challenge adventures.
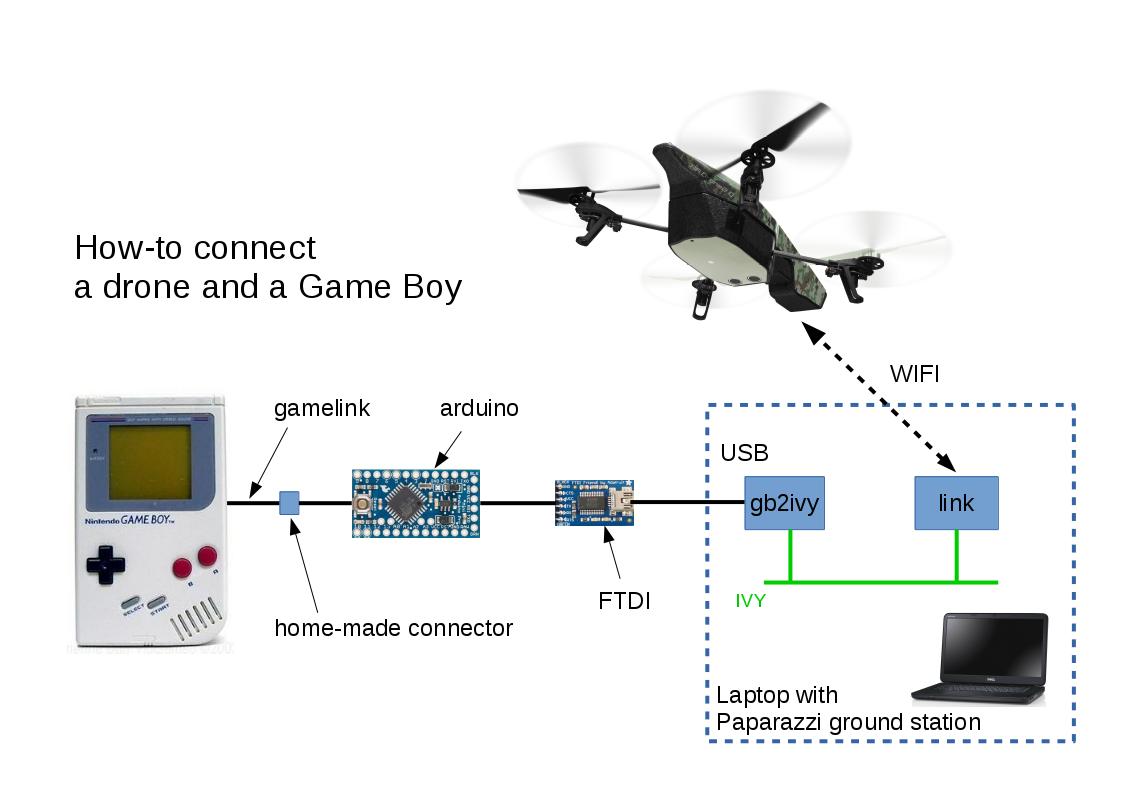
Some time ago, I found my old Game Boy at my parents’ house. So the first thing that came to my mind was: can I fly a drone with this ? (and also where is my Mario Bros cartridge).
So I spend some time searching the web to see if I could find some idea to solve my problem. And if it seems that piloting unmanned aircraft with a Game Boy is not so common, you can find everything you need to program it!
But you can’t expect to go directly to an old custom serial com port to a wifi-based drone without some intermediate steps:
Finally, the Game Boy is just sending the bitmask corresponding to the buttons being pressed (with an Arduino and a FTDI to convert Game Link signals to USB), and a small program on the ground station converts this into actual commands for the drone (an ARDrone2 from Parrot with an extra GPS in my case).
I made a new video describing the details of the G0 Paparazzi UAV GPS receiver module. In the video I go through and describe the several design decisions we made to ensure high Signal to Noise Ratio, good multi path GPS signal rejection and overall reliability of the GPS for use in airborne robotics applications.
I hope this video is helpful. If you think so too please let me know in the YouTube comments. If you enjoyed the video make sure to like it on YouTube and subscribe to the channel.
G0 is now available for purchase in the 1BitSquared store together with the Elle0 autopilot. It is available in both of our stores; the US Store and the German Store. So if you live in the European union, you can now buy Elle for your next UAV project without having to worry about customs and shipping time. 🙂
Cheers, and successful flights,
Esden and the 1BitSquared team
I made a new video describing the details of the Elle0 Paparazzi UAV autopilot. Elle0 is now available for purchase in the 1BitSquared store together with the G0 companion GPS receiver. In the video I go through and describe every IO pin as well as some of the design differences to the Lisa/MX Autopilot. Additionally, I describe how you can add a battery voltage monitor to your Elle0 using a voltage divider circuit.
I hope this video is helpful. If you think so too please let me know in the YouTube comments. I am planning to make many more videos describing different aspects of Paparazzi UAV, not only hardware but also flight videos and Paparazzi software tutorials and tips. If you think it will be useful for you make sure to subscribe and tell me in the comments what you would like to see.
Also, check out the Elle0 paparazzi wiki page for more information about the autopilot itself and diagrams of the system. Additionally to the Elle0 and G0 boards we have also released a matching R0 radio board and UU0 UART to USB adapter boards. We will be making videos describing more parts of the modular system we are working on soon. Whereas the Elle0 and G0 are already in stock, the R0 & UU0 are available for Pre-Order in our US store.
Cheers, and successful flights,
Esden and the 1BitSquared team
Using Paparazzi’s flight plan software to dictate a pattern of waypoints for three of his TeensyFly MAV’s to take off autonomously, hover, fly a rectangular pattern, hover and land. All the flight plan blocks are triggered in unison with a custom papget xml config file. The unison nature of their flight is quite beautiful to behold.
And a behind the scenes clip of a flying robot getting a little help from a friend. 🙂
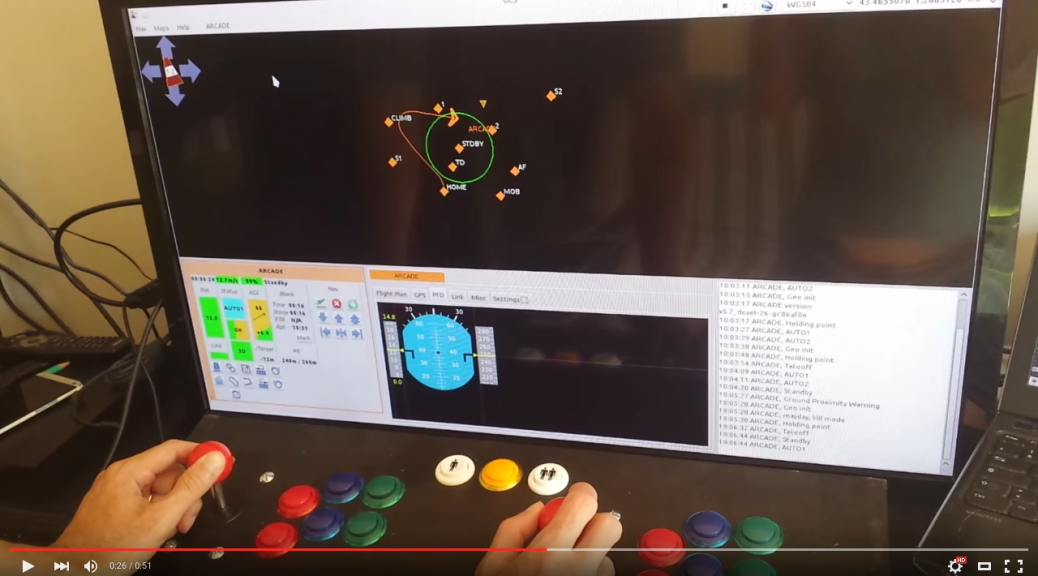
Here is a fun demo by the ENAC UAV Lab. They are showing off the flexibility of the Paparazzi UAV system by connecting an arcade gamepad to the ground station.
Research and development of open-source UAV systems since 2003