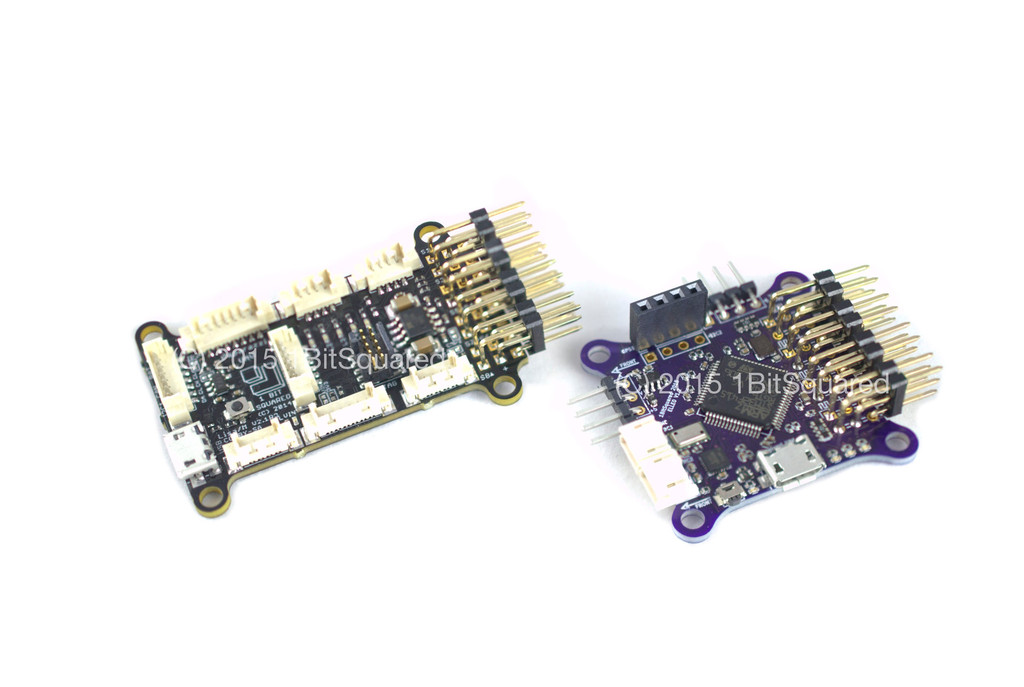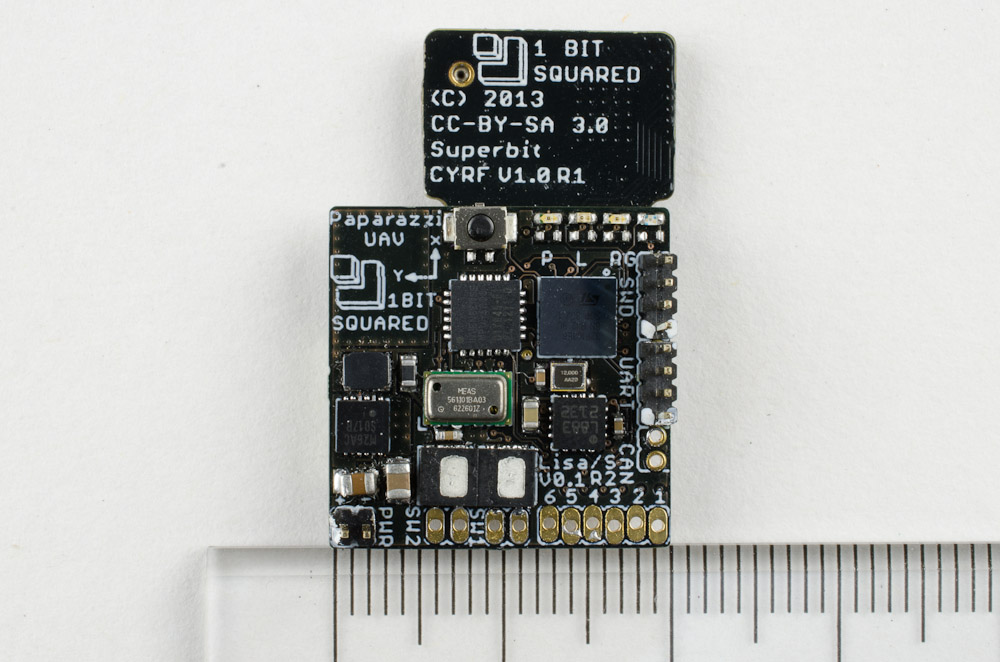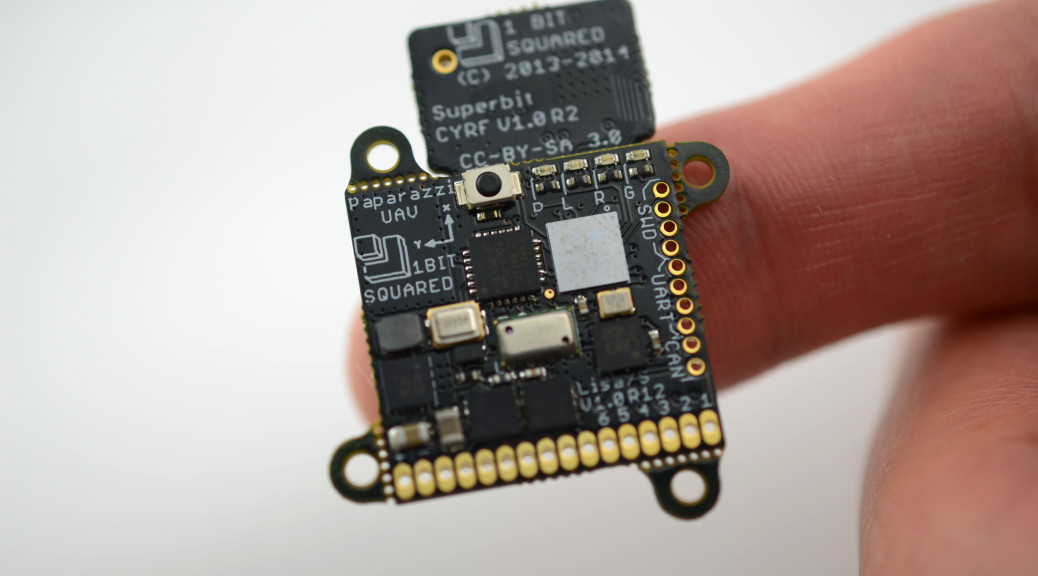
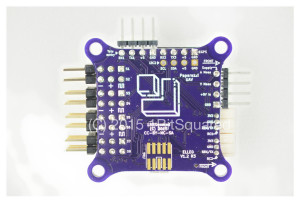
1BitSquared has released Elle0, a new Paparazzi UAV autopilot. Elle0 is the lowest cost autopilot developed specifically for use with the Paparazzi UAV framework. It was inspired by the Lisa/MX and Apogee autopilots and has been stripped down to the most essential features while preserving the flexibility that Paparazzi autopilots are famous for.
Here are some of the specs:
- STM32F4 168MHz ARM Cortex-M4 microcontroller with FPU
- 1 Mbyte of Flash memory
- 192+4 Kbytes of SRAM including 64-Kbyte of CCM (core coupled memory) data RAM
- Cryptographic acceleration: hardware acceleration for AES 128, 192, 256, Triple DES, HASH (MD5, SHA-1), and HMAC
- True random number generator
- 3 axis gyroscope (connected over SPI for high speed sampling and low latency)
- 3 axis accelerometer (connected over SPI for high speed sampling and low latency)
- 3 axis magnetometer (connected over SPI for high speed sampling and low latency)
- barometer (connected over dedicated SPI for low noise operation and low latency)
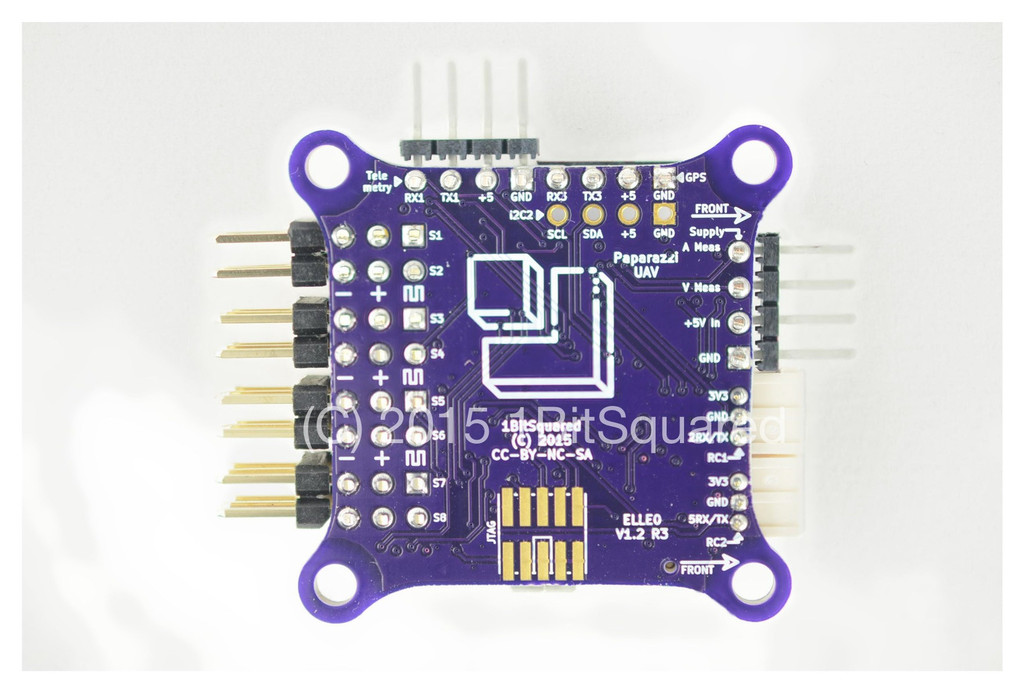
- 1 I2C auxilary sensor connection
- 2 TTL level serial ports for telemetry radio and GPS
- 2 serial input interfaces for remote control receivers (using Spektrum compatible JST connectors)
- 1 USB port for easy firmware upgrade
- 8 PWM outputs/inputs for servos or legacy PPM RC receivers
- 2 Analog inputs for system battery voltage and current measurement
- CAN TX and RX lines are accessible
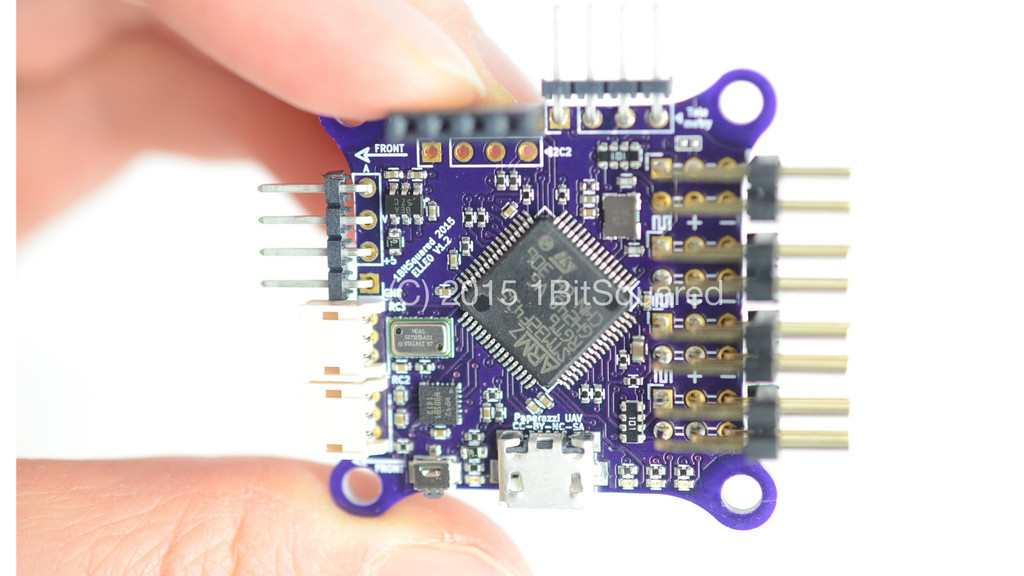
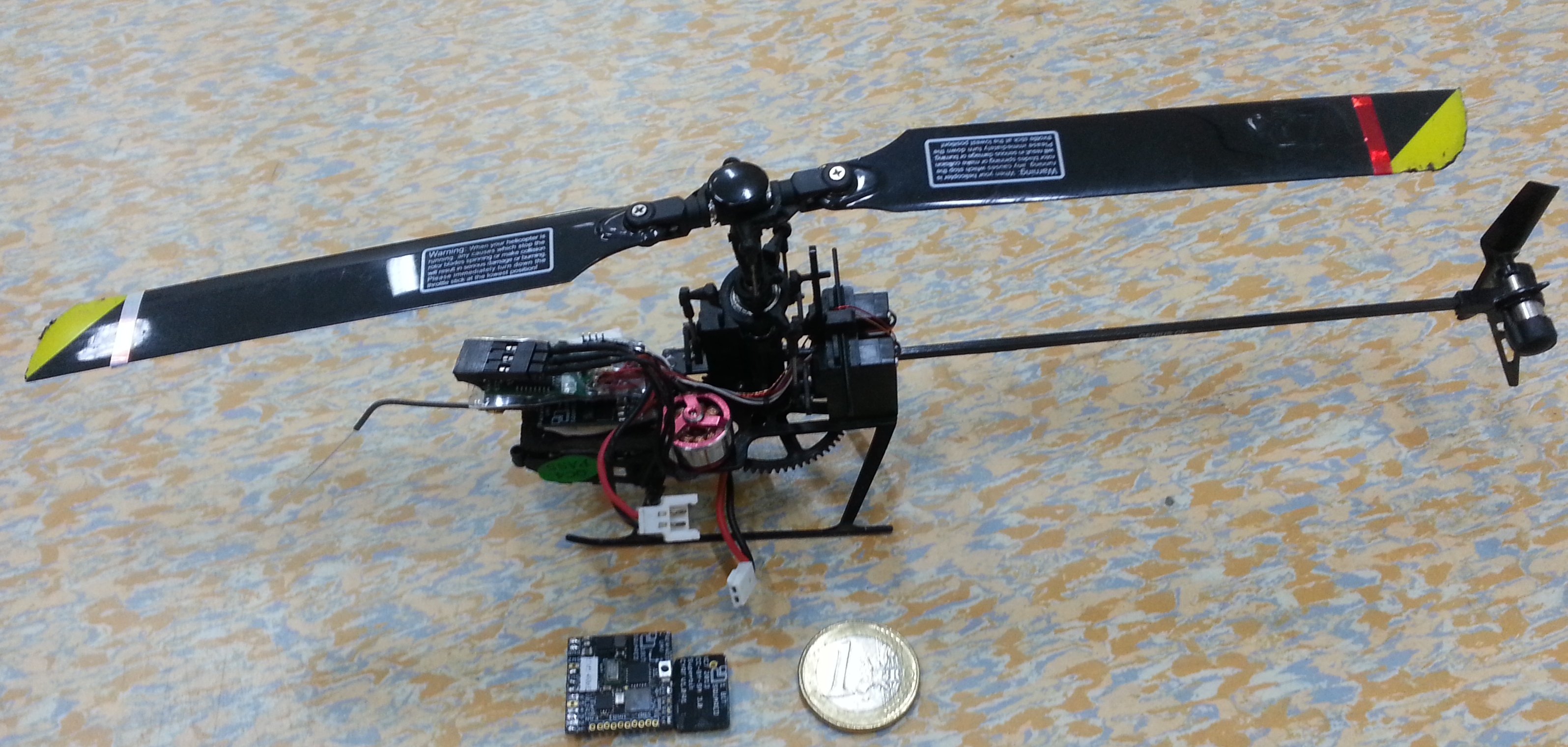
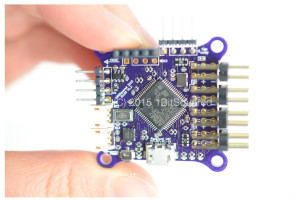
 Mechanically Elle0 is designed around the 30.5mm M3 hole pattern, popularized by the Nano Quad community. But Elle0 can be used on more than just Nano Quads, it has everything on board to control anything from a small Quad through a big Octocopter to Airplanes or Helicopters. For an autonomous UAV you just need to add a GPS, Telemetry radio and maybe RC receivers. 😉
Mechanically Elle0 is designed around the 30.5mm M3 hole pattern, popularized by the Nano Quad community. But Elle0 can be used on more than just Nano Quads, it has everything on board to control anything from a small Quad through a big Octocopter to Airplanes or Helicopters. For an autonomous UAV you just need to add a GPS, Telemetry radio and maybe RC receivers. 😉
Apropos RC receivers, Elle0 provides two Spektrum Satellite compatible connectors. You don’t have to crimp special wires to connect your Spektrum Diversity setup to your autopilot anymore!
For more information check out our Wiki Page. 1BitSquared is offering Elle0 for Pre-Order in their store. Elle0 will start shipping early 2016.