 Due to popular demand, Lisa/S and SuperbitRF are available for early pre-order from 1 BIT SQUARED.
Due to popular demand, Lisa/S and SuperbitRF are available for early pre-order from 1 BIT SQUARED.
Category Archives: Hardware
Lisa/S at TU-Delft
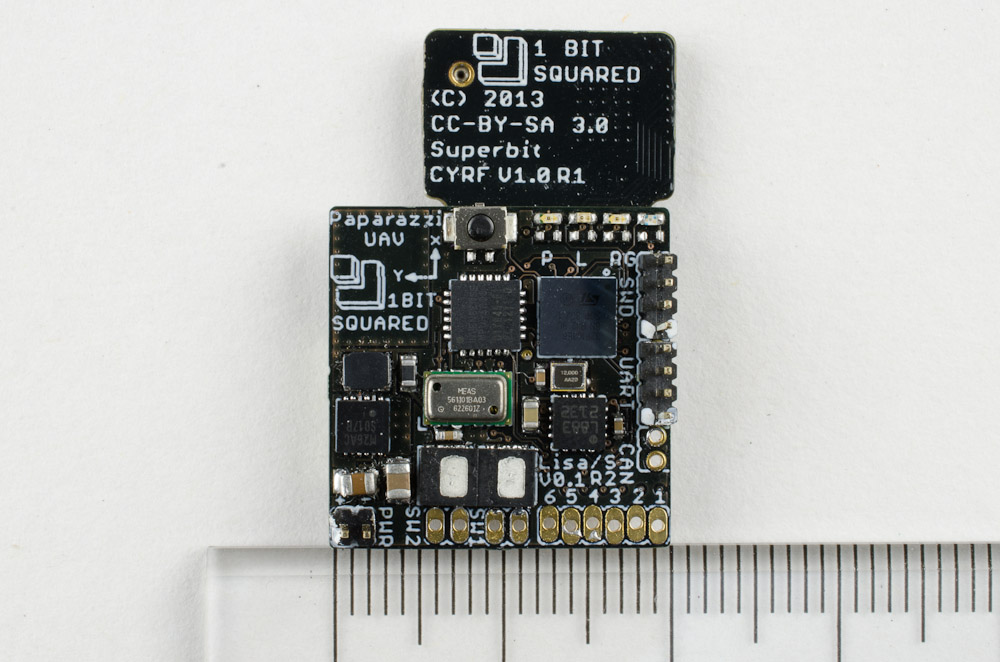
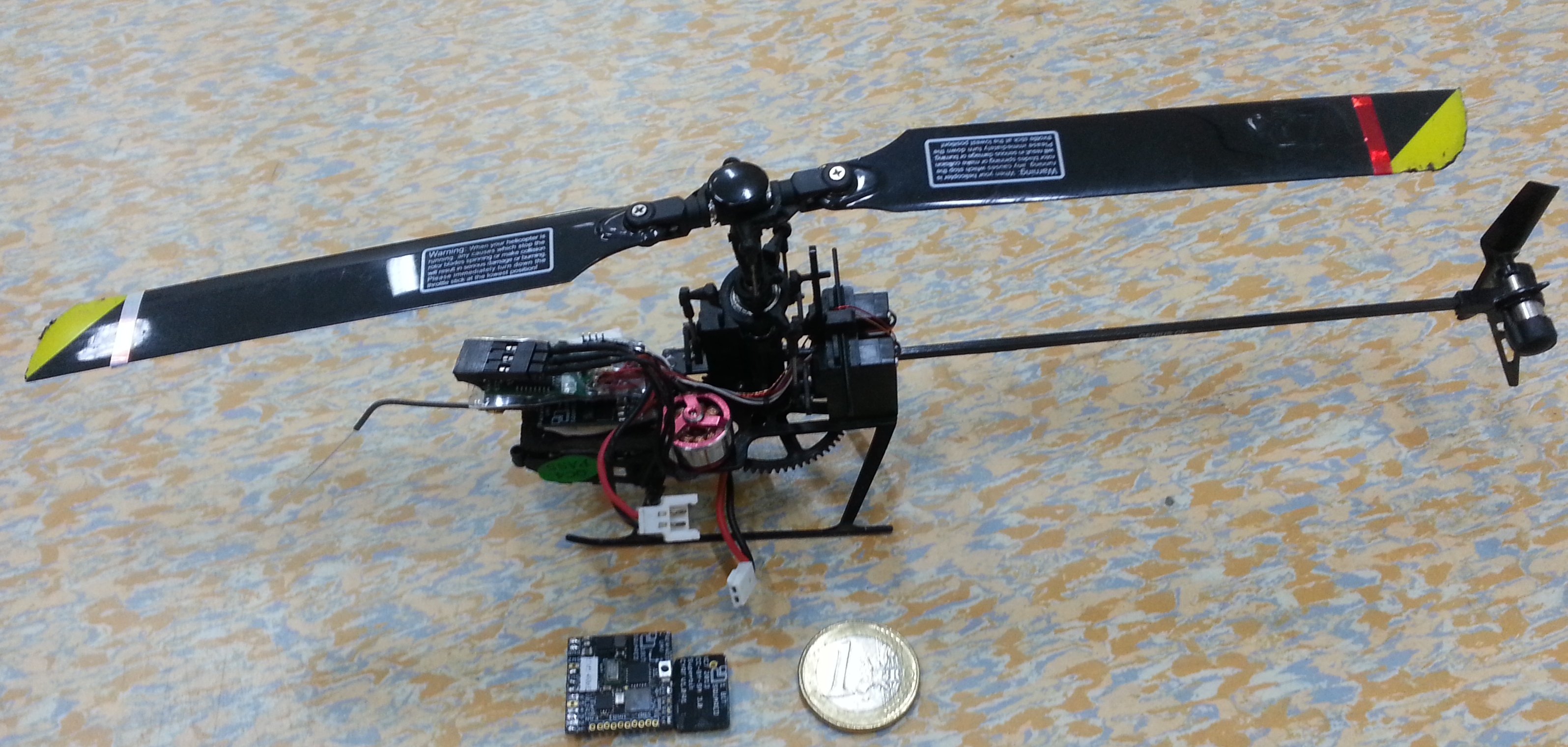
Our friends at the TU-Delft MAVLab have made a video showing Lisa/S flying on a Quadrocopter and Helicopter. In the video you can see the Paparazzi UAV software compiled for Lisa/S stabilize and control the aircraft. It is using the SuperbitRF module to receive control commands from a Spektrum RC transmitter. All the necessary software is integrated into the master software branch of Paparazzi.
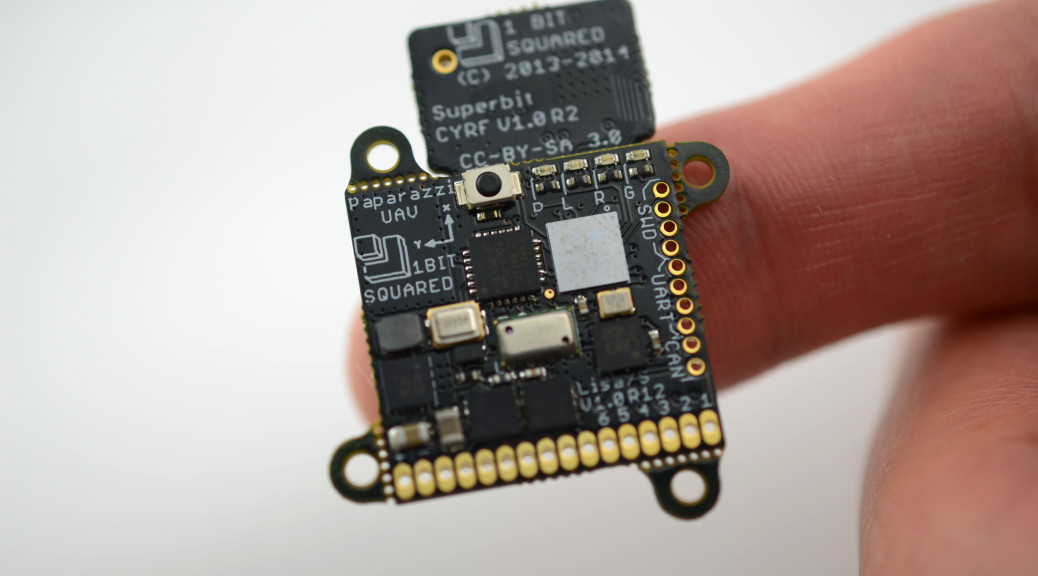
Lisa/S The Worlds Smallest UAV Autopilot
 TU Delft researchers in collaboration with 1BitSquared have designed and build the world’s smallest autopilot for micro aircraft.
TU Delft researchers in collaboration with 1BitSquared have designed and build the world’s smallest autopilot for micro aircraft.
Researcher Bart Remes and his team of the Micro Aerial Vehicle Laboratory at the TU Delft faculty of Aerospace Engineering in a collaboration with Piotr Esden-Tempski from 1BitSquared have designed, built and tested the world’s smallest open source autopilot for small unmanned aircraft. A smaller – and lighter – autopilot allows these small flying robots to fly longer, fit into narrower spaces or carry more payloads, such as cameras. That makes them more suitable to be used in rescue operations for example. Remes: “Our aim? Make MAVs so small and light that every fireman can fit one in his pocket.”
More information:
Hardware electronics will be sold by (from January 2014 onward) 1BitSquared
Lisa/S V0.1 Design
Lisa/S nano autopilot V0.1 PCB Layout video – 6 months of work in 3 minutes.
Designing new hardware takes time. Laying out a board is only part of the challenge. A lot of work goes into research about the parts and circuits to use. In the following video you can see how the whole engineering effort concludes into the final design of the board. Even though the time lapse shows only 7 hours and 48 minutes of layout work, it was spread over 6 months of engineering effort.
Autonomous Paparazzi Parrot AR Drone
 At the TU Delft university of technology student teams made the impossible; possible. Now you can turn your AR Drone v2 into an autonomous drone, controlled by Paparazzi autopilot software. It’s simple, Insert GPS receiver into USB port, build and upload your flight plan via WiFi, and you are done! No hardware modification needed.
At the TU Delft university of technology student teams made the impossible; possible. Now you can turn your AR Drone v2 into an autonomous drone, controlled by Paparazzi autopilot software. It’s simple, Insert GPS receiver into USB port, build and upload your flight plan via WiFi, and you are done! No hardware modification needed.
…and remember, it is a Wiki, you are invited to improve the contents, as a matter of fact, we would love it!
ATMOS Hybrid UAV
 ATMOS, a hybrid airplane-quadrotor developed at the MavLab of TU-Delft, was awarded third place (out of 140) in the UAVForge Competition. There were more than 140 initial contestants and after several selection rounds with only 12 finalists, the paparazzi Lisa/M powered ATMOS was one of the few that could actually make it to the remote target site miles away in an RF unfriendly environment. No team fully completed the baseline objectives which is why no prices were issued. The vertical takeoff and landing, together with long range thanks to the wing and flexibility thanks to open-source paparazzi were key factors in this event [1].
ATMOS, a hybrid airplane-quadrotor developed at the MavLab of TU-Delft, was awarded third place (out of 140) in the UAVForge Competition. There were more than 140 initial contestants and after several selection rounds with only 12 finalists, the paparazzi Lisa/M powered ATMOS was one of the few that could actually make it to the remote target site miles away in an RF unfriendly environment. No team fully completed the baseline objectives which is why no prices were issued. The vertical takeoff and landing, together with long range thanks to the wing and flexibility thanks to open-source paparazzi were key factors in this event [1].
But probably more important, the development of ATMOS has added a new code-base to paparazzi to enable the control of any hybrid multi-lifting device vehicle. ATMOS can take-off vertically as a quadrotor, transition to full forward flight as an airplane but also fly in any intermediate transition stage fully autonomously. So let your imagination go wild!
Paparazzi YouTube Playlist
 A lot of cool stuff is done with paparazzi driven UAV`s. To share what the paparazzi community is doing a youtube video playlist has been created. If you want your video to be listed in there please send a YouTube link to the mailing list.
A lot of cool stuff is done with paparazzi driven UAV`s. To share what the paparazzi community is doing a youtube video playlist has been created. If you want your video to be listed in there please send a YouTube link to the mailing list.
UMARIM V1.0
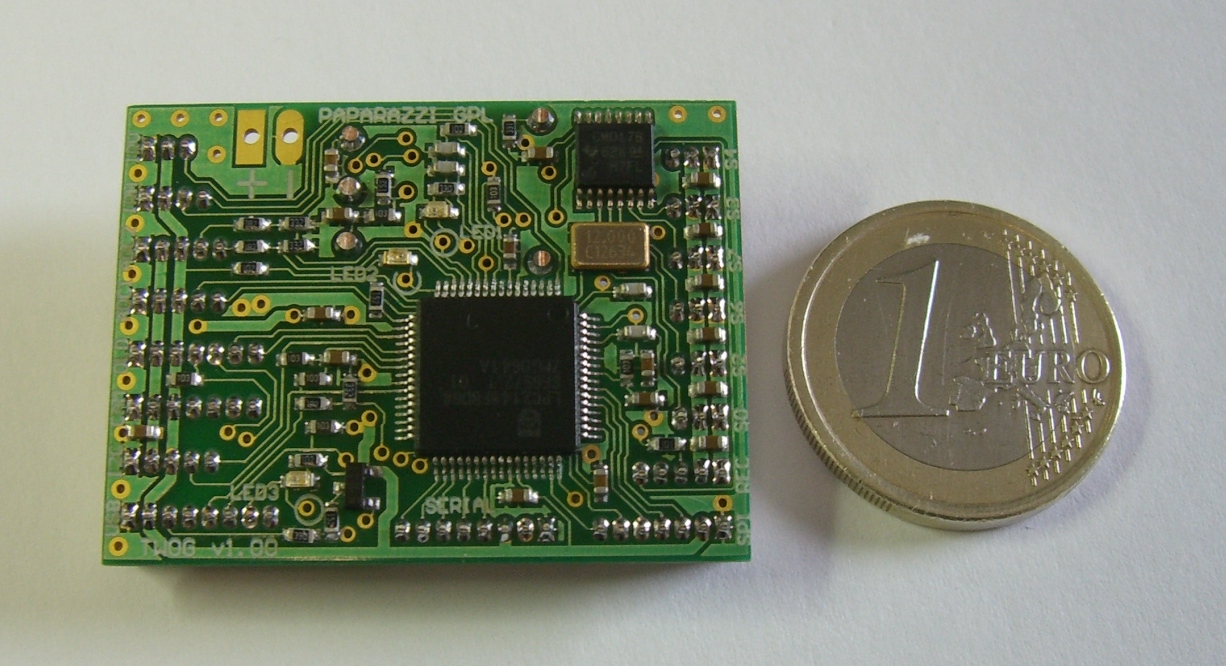 ENAC Team Umarim V1.0 autopilot is now released: LPC based, on-board IMU & barometer, narrow fuselage form factor (56x25mm) and lightweight (9gr) are its main features. Add your favorite GPS receiver and it will fit in your thin light UAV prototype. But it will also do the job for a bigger UAV as well. More info here…
ENAC Team Umarim V1.0 autopilot is now released: LPC based, on-board IMU & barometer, narrow fuselage form factor (56x25mm) and lightweight (9gr) are its main features. Add your favorite GPS receiver and it will fit in your thin light UAV prototype. But it will also do the job for a bigger UAV as well. More info here…
Lisa/M for developers

Hello everyone,
After many months of hard work we have finally reached a version of Lisa/M that is ready for a wider range of developers. Although there are still some things missing that would allow a beginning user to use it with ease, we decided it is better to provide it to all of the other brilliant non core developers and users. You can find out more about it in the Paparazzi Wiki. A big thanks go to OpenUAS for his great help with the documentation.

And before you start asking, it is not fully Open-Hardware YET! The schematics are available in the SVN as well as in the Wiki. The eagle board layout files will follow soon.
Let us know what you plan to build with this autopilot. Also if you have built an aircraft with Lisa/L or Aspirin we would be very happy to see them. Just drop a comment below with a link to a picture. Let’s spread the word of what is possible with Paparazzi!!!
Let’s get flying!
Cheers Esden
Aspirin IMU Release
 Today we are pleased to announce the public release of our next generation IMU, Aspirin! After a lengthy research, development, and testing period we are now happy with the hardware and the software drivers for this unique IMU. It is incredibly small and light, three digital sensors packed onto a single 19x14mm PCB. The footprint allows you to integrate it into your own designs too. We are also making it available via a carrier board for drop in use on Lisa/L.
Today we are pleased to announce the public release of our next generation IMU, Aspirin! After a lengthy research, development, and testing period we are now happy with the hardware and the software drivers for this unique IMU. It is incredibly small and light, three digital sensors packed onto a single 19x14mm PCB. The footprint allows you to integrate it into your own designs too. We are also making it available via a carrier board for drop in use on Lisa/L.
Besides its small size Aspirin is cheaper then the Booz IMU you already know. The use of all digital sensors reduces size, cost and complexity while simplifying calibration.
Aspirin provides 9 degrees of measurement (DOM): 3 axis linear acceleration, 3 axis angular velocity, and 3 axis magnetic field measurement.
It consists of:
- 3 axis accelerometer (ADXL345)
- 3 axis gyroscope (IMU-3000)
- 3 axis magnetometer (HMC5843)
This IMU is ready for the next generation Lisa/M autopilot that we wrote about before. The module fits directly on Lisa/M without the need of a carrier board.
We did not add an MCU on the board to save space, reduce cost, and improve latency behavior when connected to an autopilot. You have direct access to the sensor busses.
Aspirin uses the latest generation of Invensense 3 axis MEMS gyroscopes. IMU-3000’s advantage over other sensors (such as ITG-3200 found in similar IMU designs) is its selectable range. Selectable range allows the user to obtain maximum resolution and optimum performance, depending on vehicle dynamics and desired flight mode. No longer will it be necessary to limit vehicle dynamics to 300º/s, as Aspirin’s gyroscopes have a range of up to 2000º/s.
Here a small video of a Quad with Lisa/L autopilot with Aspirin IMU running Paparazzi rotorcraft firmware, for some additional entertainment. Have fun! 🙂
Cheers your Paparazzi team.