Great interview with Martin Müller on Chaos Radio Express 187. Discussing the history and the inner workings of Paparazzi. Enjoy!
All posts by Piotr Esden-Tempski
Paparazzi Based Hybrid UAV
 Paparazzi is used in the Quadshot: A blend between a quadrocopter and a flying wing. The Quadshot and Paparazzi are also featured in an episode of Hak5. You can also skip directly to the interview with Piotr Esden-Tempski talking about how Paparazzi is used in the Quadshot, and briefly explains the XML airframe file and the GCS.
Paparazzi is used in the Quadshot: A blend between a quadrocopter and a flying wing. The Quadshot and Paparazzi are also featured in an episode of Hak5. You can also skip directly to the interview with Piotr Esden-Tempski talking about how Paparazzi is used in the Quadshot, and briefly explains the XML airframe file and the GCS.
Lisa/M for developers

Hello everyone,
After many months of hard work we have finally reached a version of Lisa/M that is ready for a wider range of developers. Although there are still some things missing that would allow a beginning user to use it with ease, we decided it is better to provide it to all of the other brilliant non core developers and users. You can find out more about it in the Paparazzi Wiki. A big thanks go to OpenUAS for his great help with the documentation.

And before you start asking, it is not fully Open-Hardware YET! The schematics are available in the SVN as well as in the Wiki. The eagle board layout files will follow soon.
Let us know what you plan to build with this autopilot. Also if you have built an aircraft with Lisa/L or Aspirin we would be very happy to see them. Just drop a comment below with a link to a picture. Let’s spread the word of what is possible with Paparazzi!!!
Let’s get flying!
Cheers Esden
Aspirin IMU Release
 Today we are pleased to announce the public release of our next generation IMU, Aspirin! After a lengthy research, development, and testing period we are now happy with the hardware and the software drivers for this unique IMU. It is incredibly small and light, three digital sensors packed onto a single 19x14mm PCB. The footprint allows you to integrate it into your own designs too. We are also making it available via a carrier board for drop in use on Lisa/L.
Today we are pleased to announce the public release of our next generation IMU, Aspirin! After a lengthy research, development, and testing period we are now happy with the hardware and the software drivers for this unique IMU. It is incredibly small and light, three digital sensors packed onto a single 19x14mm PCB. The footprint allows you to integrate it into your own designs too. We are also making it available via a carrier board for drop in use on Lisa/L.
Besides its small size Aspirin is cheaper then the Booz IMU you already know. The use of all digital sensors reduces size, cost and complexity while simplifying calibration.
Aspirin provides 9 degrees of measurement (DOM): 3 axis linear acceleration, 3 axis angular velocity, and 3 axis magnetic field measurement.
It consists of:
- 3 axis accelerometer (ADXL345)
- 3 axis gyroscope (IMU-3000)
- 3 axis magnetometer (HMC5843)
This IMU is ready for the next generation Lisa/M autopilot that we wrote about before. The module fits directly on Lisa/M without the need of a carrier board.
We did not add an MCU on the board to save space, reduce cost, and improve latency behavior when connected to an autopilot. You have direct access to the sensor busses.
Aspirin uses the latest generation of Invensense 3 axis MEMS gyroscopes. IMU-3000’s advantage over other sensors (such as ITG-3200 found in similar IMU designs) is its selectable range. Selectable range allows the user to obtain maximum resolution and optimum performance, depending on vehicle dynamics and desired flight mode. No longer will it be necessary to limit vehicle dynamics to 300º/s, as Aspirin’s gyroscopes have a range of up to 2000º/s.
Here a small video of a Quad with Lisa/L autopilot with Aspirin IMU running Paparazzi rotorcraft firmware, for some additional entertainment. Have fun! 🙂
Cheers your Paparazzi team.
Paparazzi at Chaos Communication Camp 2011
 Hi,
Hi,
Just to give you guys a heads up. Several of the Paparazzi core developers are planning to go to the Chaos Communication Camp 2011 in Finowfurt (near Berlin) in Germany. The event will last for the 4 days 10|11|12|13|14th August 2011. If you have a chance be sure to visit us there. We plan on releasing some really cool new things at the event. I am sure if you are interested in UAV, Multicopter or Aircraft you will not want to miss this!
We hope to see you there!
Cheers, your Paparazzi Team.
Paparazzi at the 27C3
 It has been a little quiet here over the Christmas and New Year break. We were busy though. Felix Ruess, Martin Müller and me (Piotr Esden-Tempski) were at the 27th Chaos Communication Congress in Berlin. We presented Paparazzi and received lot’s of interest.
It has been a little quiet here over the Christmas and New Year break. We were busy though. Felix Ruess, Martin Müller and me (Piotr Esden-Tempski) were at the 27th Chaos Communication Congress in Berlin. We presented Paparazzi and received lot’s of interest.
Felix gave an interview about Paparazzi to Projectmovie 2010. It is in German but the makers of the movie are planning to add English subtitles to the movie at some point. 🙂
Cheers your Paparazzi Team
Lisa/M next generation entry level Paparazzi Autopilot

As promised, we want to talk about projects we are currently working on. One of them is Lisa/M.
Lisa/M will be the medium sized Autopilot based on the STM32 Cortex-M3 microcontroller. It is part of the Lisa series of Autopilots. It is very small (50mm x 25mm), about the size of an RC receiver. We want it to be as affordable as possible so that more people can join the autonomous aircraft revolution. The final cost still needs to be determined, as we are not done with the development yet.
Due to its large capabilities and small size, it can be used as a full Autopilot for fixed wing airplanes, multicopters and helicopters, as well as an IO extender/repeater (in which case the IMU can be left out, cutting the cost significantly).
One other interesting feature is that it can host the SMD mounted Aspirin IMU without adding size. The Aspirin IMU is the next generation small, flat, low part count and cheap IMU that will get an article by itself.
Lisa/M features a multitude of interfaces:
- CAN serial
- USB
- SPI serial
- I2C serial
- 2 RS232 3V3 and 5V TTL level (UART)
- 6 PWM servo outputs
- 7 analog inputs
- 3 general purpose digital in-/out-puts
Lisa/M with mounted IMU has the following sensors on board:
- 3 Axis Gyroscope
- 3 Axis Accelerometer
- 3 Axis Magnetometer
- Pressure sensor
The pressure sensor is mounted directly on Lisa/M as this sensor is not provided by Aspirin. Without a GPS unit you have all necessary sensors for full attitude and altitude stabilization in an extremely small package (if you know of a smaller one, let us know!). With an external GPS unit, it is a full fledged Autopilot.
Now you may ask when will it be available for prime time. We can’t give you a definite answer just yet. What we definitely can say is that it will be as soon as it is ready. 🙂
But now seriously. We are currently working on the second revision of our prototypes. Based on our experience it takes 3 to 4 revisions of a hardware design to get it right. That means in a few months if everything goes well.
Don’t lose faith though. The first design was already good enough to be able to fly an airplane. That means that there are no major mistakes in the design.
We will of course keep you up to date on this projects progress in future articles.
Cheers … your Paparazzi team.
Welcome to the all new Paparazzi UAV Blog
 Hello everyone,
Hello everyone,
As the Paparazzi community is very active and getting bigger every day, we have decided that it is time to make a blog that reflects the thriving development and keeps everyone up to date. We hope to inform everyone about new features, challenges and plans.
Paparazzi is the only really Open-Source (hardware and software) UAV project in the world with proven capability and stability.
To support that statement we offer the following statistics:
The current codebase contains 144,959 lines of code made up of:
- 110,279 lines of ansi C
- 24,904 lines of Ocaml
- 3,724 lines of shellscript
- 2,202 lines of python
- 1,710 lines of C++
- 1,422 lines of perl
- 602 lines of assembler
- 116 lines of lex
On the hardware side there are 47 Eagle CAD schematic files and 46 Eagle CAD board files covering several autopilot designs and their related sensor and power systems.
Paparazzi supports the use of thermopiles or IMUs for attitude estimation in fixed wing aircraft and IMUs only for rotorcraft (helicopters, quadcopters, hexacopters). Presently there are 11 airframes officially supported for use as exemplars with a further 153 user contributed airframes.
Paparazzi is unusually flexible in its ground control architecture in that it consists of a series of agents that communicate via a software bus. This has already allowed a UAV to be controlled using the internet as part of the telemetry link.
But enough of the self praise. Welcome everyone to our shiny new blog and I hope you will enjoy the amazing trip with us. 🙂
Cheers your Paparazzi Crew
We Moved To GIT
 The paparazzi software repository now has a new happy life on github:
The paparazzi software repository now has a new happy life on github:
https://github.com/paparazzi/paparazzi
We believe the switch from Subversion to the fast git version control system will make development easier, faster and more fun. It also makes it easier for YOU to contribute. You can easily fork paparazzi on github, commit your bugfixes and new features and send us a pull request.
More info on how to get the paparazzi code from github can be found here.
We also want to encourage you to submit bugs or feature requests on the simple github issue tracker.
Paparazzi V1.0
This article is based on the gallery on the original paparazzi savannah website.
The following pictures were taken between August 2003 and October 2003.
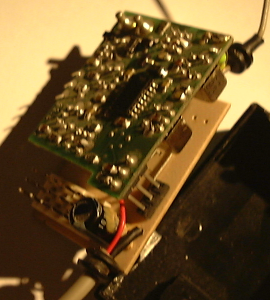
We had developed a flight controller board similar to the autopilot one. We had been able to re-use some of their code – for example radio control receiving or servos commanding. Thanks allot Trammel.
The plane now had the potential to become fully autonomous (not controlled from ground anymore).
We made some test with the autopilot inertial sensor (3 gyros, 3 accels) and discovered that it was not that easy to go from “tilt.c” to something that would work in our plane.
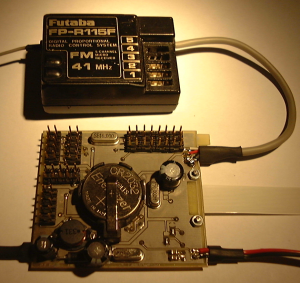
Out of despair, we plugged the FMA sensor to our controller board ADCs, wrote some cheap proportional controllers and … surprise, it worked very well.
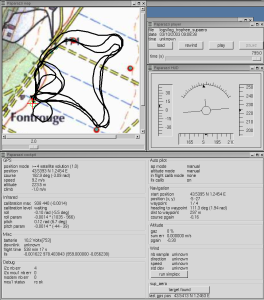
We worked on calibration (how to estimate attitude angles from temperature differences), and Pascal came out with a Linear Least Square method that gave good results. We observe the turn radius given by GPS. Under the coordinated turn hypothesis, we can convert it to bank angle that will be compared with the one obtained from infrared. The Linear Least Square algorithm will minimize this error.
This system was awarded first price for autonomous flight at the Ensica/Supaero second European MAV trophy in front of 4 international teams.
We had a bad surprise during this competition. A radio control interference disengaged the autopilot during the flight. I was able to reengage it and the flight continued with no other problem. We now filter the radio control signal on mode toggling channels and didn’t experience such phenomenon since. This is not satisfying. The only solution to be really sure would be to go PCM. Trouble is that radio control makers won’t publish their signal specifications. The Futaba PCM was more or less reverse engineered and we are thinking about buying a transmitter from that brand.
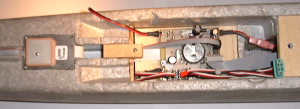
The airframe was still a twinstar. It was loaded with several packs of batteries – was very heavy and had a small flight endurance.
We have mounted the autopilot in a maxi-kiool, an enlarged version of the minus-kiool. This plane was light and flew long and well. It had a brushless motor and lipos batteries. This high priced gear had been offered to us by the Pyrénées Modèles shop in Toulouse. Thank you Mr Garat. Saint IGNUcius will give it back to you 🙂
We stopped using it because it was very fragile. The 56g version had no trouble landing on its motor but the 800g one didn’t like it very much. Another reason why we abandoned that plane is that Supaero regarded the design as his and intended to use it for competitions were we would be opposed. They made a high tech carbon/kevlar molded version which they measured in their wind tunnel. I’m not aware that this plane is regularly flying.
After the trophy, we were contacted by people wishing to use Paparazzi. We took conscience that our code was not configurable and would cause problem to port to another airframe.
We began to rewrite it to support an high level configuration language.