As you know paparazzi is a very modular platform. To show the world how modular we are, we worked hard on implementing paparazzi into the Parrot Bebop. At the Micro Aerial Vehicle Laboratory (MAVLab) of Delft University of Technology faculty Aerospace engineering (TU Delft) we received a pre-production model of the Bebop. We did our best to have paparazzi integrated before the launch of the Bebop. If you want to follow the progress check our (youtube channel).
4 hours after reception of the Bebop
8 hours later after hacking the ESC check-sum we had our First Flight!!!!
4 hours later our first autonomous outdoor flight in paparazzi !!!
IMAV 2014 was a great experience this year. If you don’t know what it is, its a micro air vehicle competition and conference that was held in Delft, Netherlands.
During the three days of the conference, there were many very interesting talks and presentations as well as an incredible showcase of research talent during the competition. Here is a playlist of the talks, they can be found on the TU Delft MAVlab YouTube channel.
One talk we wanted to highlight was presented by Gautier Hattenberger from ENAC, he is also one of the core developers of Paparazzi UAV. He gave a very interesting talk highlighting the use of the Paparazzi UAV framework in autonomous aerial robot research.
Bart Remes gave a presentation on the Paparazzi UAV Lisa/S and nano Quadcopters. If you are interested in the technical side of the hardware you will definitely enjoy his talk.
If you were curious about the results of the competition, the first place was taken by a Singapore team with a great fleet of high tech quadcopters. The second place went to a German team led by Prof. Dr.-Ing. Klaus-Peter Neitzke that flew completely FPV and the third place went to our friends at ENAC flying Paparazzi powered quadcopters and airplanes. They also created the most usable and complete aerial maps of the village.
And finally we have to thank Bart Remes and the TU-Delft MavLab team that made the whole event possible.
The Micro Aerial Vehicle Laboratory (MAVLab) of Delft University of Technology (TU Delft) is proud the present the 2014 International Micro Air Vehicle Conference (IMAV 2014), now offering the possibility of attending the conference by live stream free-of-cost. The live stream will support most platforms showing innovative keynotes of pioneers in the industry as well as the current state-of-the-art presented by many researchers working on MAV’s. The schedule is published on the website of the conference.
Tuesday, August 12th, 2014
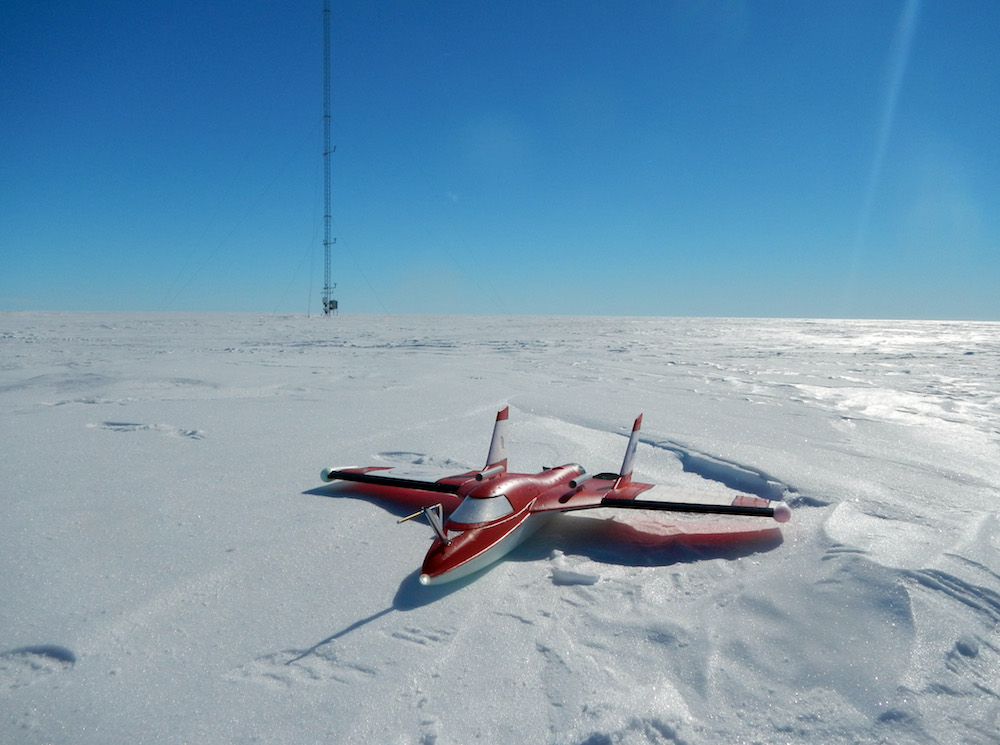
John Cassano from the University of Colorado has been flying Paparazzi equipped SUMOs in a remote camp in Antarctica over the last two weeks. See his blog for a detailed report.
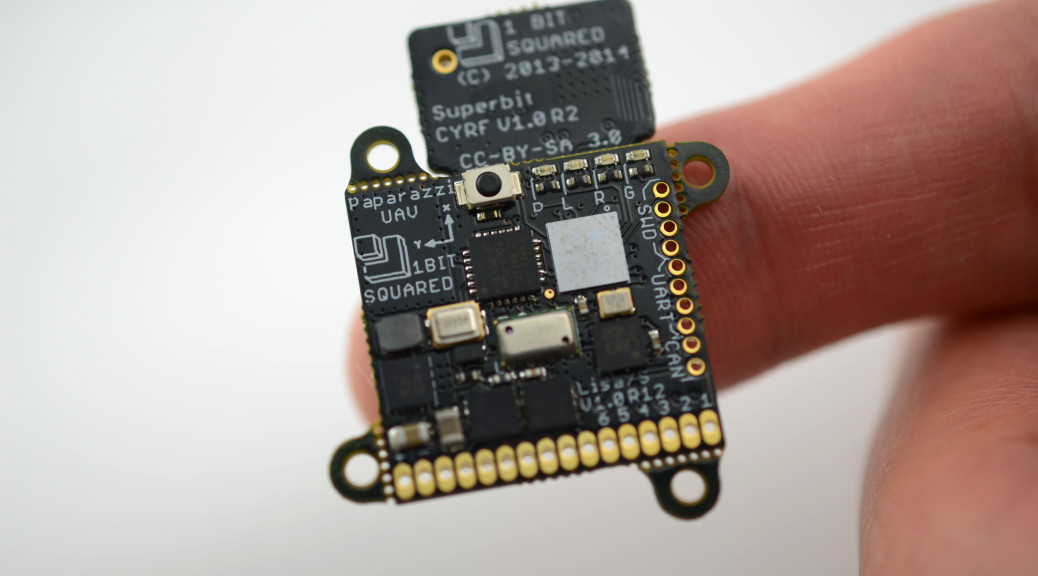
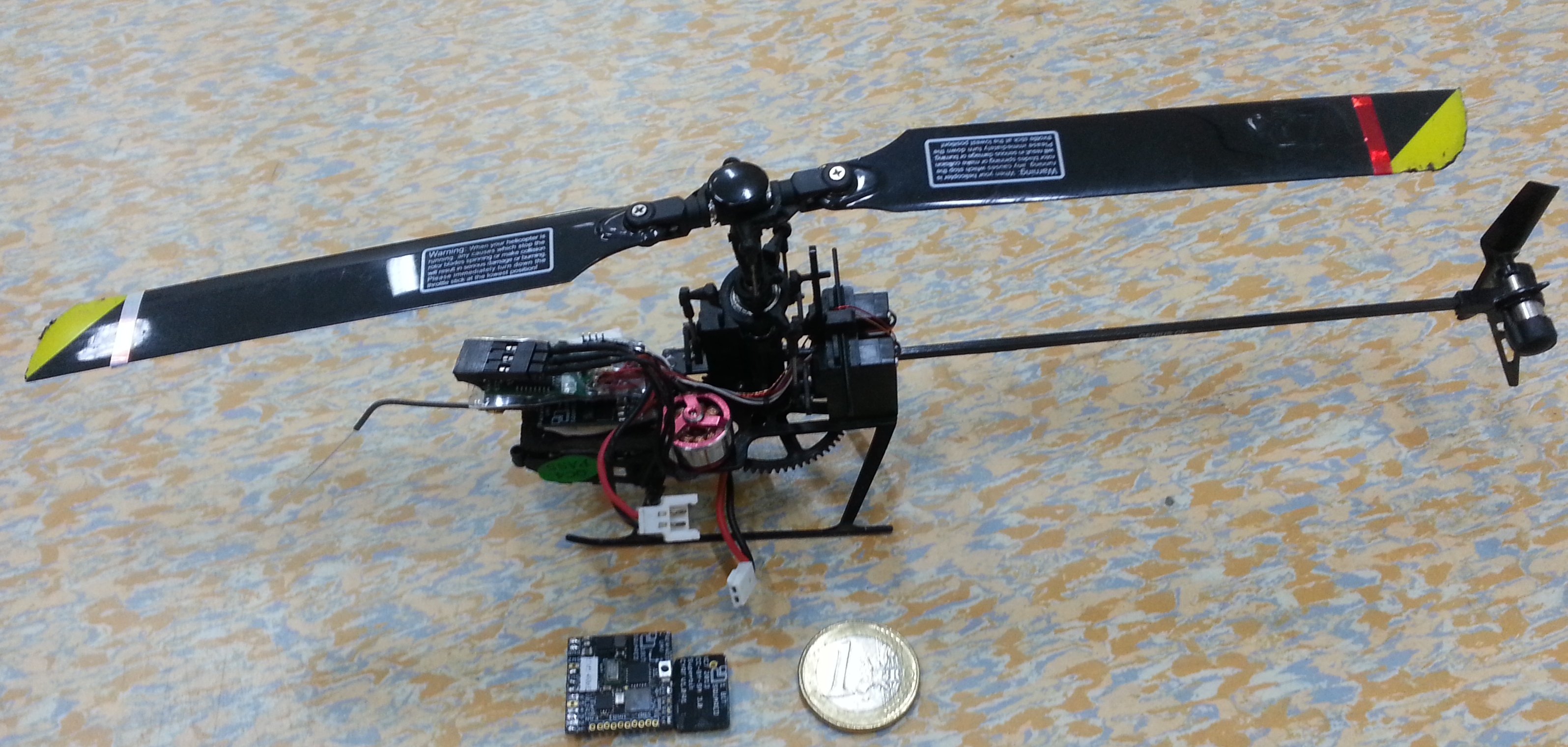
Researcher Bart Remes and his team of the Micro Aerial Vehicle Laboratory at the TU Delft faculty of Aerospace Engineering in a collaboration with Piotr Esden-Tempski from 1BitSquared have designed, built and tested the world’s smallest open source autopilot for small unmanned aircraft. A smaller – and lighter – autopilot allows these small flying robots to fly longer, fit into narrower spaces or carry more payloads, such as cameras. That makes them more suitable to be used in rescue operations for example. Remes: “Our aim? Make MAVs so small and light that every fireman can fit one in his pocket.”
More information:
Hardware electronics will be sold by (from January 2014 onward) 1BitSquared
Over the last 9 weeks the Paparazzi autopilot has been used for operations with remotely piloted aircraft from the Finnish Meteorological Institute for scientific research on board the R.V. Polarstern in the Weddell Sea/Antarctica. You can see the course and read a short report on the homepage of the Alfred Wegener Institut.
Instructions on how to build your own small unmanned meteorological observer (SUMO) can be found here in the Wiki.
In March 2012, Paparazzi flew in southern Madagascar in the frame of a multi-university project to study and improve the ecosystem in one of the poorest regions of the world (Project). More than 4000 hectares of farm and grassland were photographed in visible and near infrared spectrum. More than 8500 photos were taken. Surely one of the biggest missions for science ever flown with Paparazzi.
In the Antarctic summer of 2011/2012 two teams flew Paparazzi-driven UAS on the southernmost continent. The University of Bergen flew at the Norwegian Troll station (video) and the University of Colorado near the US McMurdo station (blog, blog). They measured temperature, humidity, pressure, infrared radiation and wind with a Multiplex Funjet plane.
Paparazzi has flown on the southernmost continent: Antarctica. Scientists from the Finnish Meteorological Institute took three modified Funjets to the Finnish Aboa station and brought them back safely after more than 25 flights. They measured temperature, humidity, pressure, wind direction and speed in altitudes up to 1000m.
The Institute of space systems of University of Stuttgart is using the paparazzi system for large remote sensing aircraft.
The missions include basic research and environmental monitoring. Payloads of up to 7kg are carried.

 As you know paparazzi is a very modular platform. To show the world how modular we are, we worked hard on implementing paparazzi into the Parrot Bebop. At the Micro Aerial Vehicle Laboratory (MAVLab) of Delft University of Technology faculty Aerospace engineering (TU Delft) we received a pre-production model of the Bebop. We did our best to have paparazzi integrated before the launch of the Bebop. If you want to follow the progress check our (youtube channel).
As you know paparazzi is a very modular platform. To show the world how modular we are, we worked hard on implementing paparazzi into the Parrot Bebop. At the Micro Aerial Vehicle Laboratory (MAVLab) of Delft University of Technology faculty Aerospace engineering (TU Delft) we received a pre-production model of the Bebop. We did our best to have paparazzi integrated before the launch of the Bebop. If you want to follow the progress check our (youtube channel).