Antoine continues to make great progress toward the holy grail of 17 state inertial navigation and releases a video showing the performance of the 7-state Kalman filtered IMU providing the attitude-heading reference system (AHRS) on his quadrotor. Note how much coffee was consumed in preparation for this video. More info on the IMU is available on the sensors page. Also, be sure to admire the schematics and source code!
Antoine continues to make great progress toward the holy grail of 17 state inertial navigation and releases a video showing the performance of the 7-state Kalman filtered IMU providing the attitude-heading reference system (AHRS) on his quadrotor. Note how much coffee was consumed in preparation for this video. More info on the IMU is available on the sensors page. Also, be sure to admire the schematics and source code!
2nd and 3rd places on MAV 06
 Two Paparazzi teams, ENAC/Miraterre and Martin Mueller/Christian Lindeberg won 2nd and 3rd place at the MAV06 competition in Sandestin, Florida. Unfortunately, both teams had insufficient video resolution to identify the 1.5m ground target
Two Paparazzi teams, ENAC/Miraterre and Martin Mueller/Christian Lindeberg won 2nd and 3rd place at the MAV06 competition in Sandestin, Florida. Unfortunately, both teams had insufficient video resolution to identify the 1.5m ground target
required for high-scoring and the winning prize went to Bringham Young University who was able to identify 2 of the 3 targets with a Panasonic KX-141 camera and an unusually narrow 30 degree FOV lens. The Bringham Young team used the Procerus Kestrel autopilot (originally developed at the university) and obviously practiced video target recognition much more than the rest of us.
Flight performance and navigation for both Dragon Slayers and the Black One was exceptional as usual. All planes performed flawless autonomous takeoffs and landings and the Slayer performed an
autonomous paintball drop with wind-corrected precision that put the ball within 3 meters of the designated target from an altitude of 40 meters in a 5 m/s wind. As luck would have it, the stress of
managing two aircraft from a single ground station during an intense competition, aggravated by a misbehaving GPS in one of the planes that required a power and flight-plan reset just prior to launch
resulted in us neglecting to re-input the target coordinates and the ball was dropped accurately on the default target location, not the actual target location provided by the judges just prior to flight.
-Five Paparazzi teams were in the six first places.
See the complete MAV06 Photo Gallery
See you next year in Toulouse, France for MAV07.

2003 – 2006
 Paparazzi has come a long way since it’s creation in 2003. For a bit of nostalgia browse the original website.
Paparazzi has come a long way since it’s creation in 2003. For a bit of nostalgia browse the original website.
EMAV 06 Results
The EMAV06 competition took place in Braunschweig, Germany. All the teams were equipped with Paparazzi. With four Paparazzi teams winning four first places. ENAC took 3rd place in the “Fixed-Wing” category.
MAV 05 Results
MAV05 took place in Garmisch, Germany. With three ENAC
Paparazzi teams taking the first three places in the competition.
JMD 04 Results
Paparazzi was very successful at the JMD04 (Journées Micro Drones) competition/conference in Toulouse, France. The ENAC team won first place with the Microjet. Here is the report from
Antoine Drouin.
Hi everybody Paparazzi's microjet won the JMD04 MAV event ( http://www.micro-uav04.net/ ) During the event, we had contact with industrials who told us they were interested in manufacturing our board. Maybe the end of the nightmare for those of you who don't enjoy the soldering iron :) We've received PCBs and assembled the new version of the controller board (v1.2.1) - The servo driver reset bug is fixed and the board seems to behave well on the desk - We'll let you know how it does in flight in the following days. We've tagged the version that we used for the trophy (jmd-04 ). You should be able to safely upgrade from the previous tagged version (emav-04). Most noticable difference is the use of UTM in place of GWS84. You'll have to setup your GPS receiver to output the correct messages. Maybe we could add our receiver configuration in the CVS ? You will also need a patched version of ivy (the network software bus) while the guy at openatc.org make a new release with the patches we sent them. We're setting up a debian package repository and let you know when it's done. We intend to break everything in the CVS head in the following days to add ground station support for several aircraft at once, so you'd better stick to the jmd-04 version for now. During the flight competition, we once again had trouble with radio jamming. We really need a checksumed rf transmission. I will call Multiplex once more to ask for their PCM specifications. If they refuse once again to disclose it, I want to define and implement a new "open" PCM protocol, eventually with low throughput data in it. We could use a commercial HF module (maybe even a frequency synthesys once) and connect it to the laptop. Then fly using a joystick or a simulator transmitter. Do you have an idea about a suitable protocol or know the interface of a commercial HF module ? A+ Antoine
PaparaDzIY – MAV’s for Dummies
Here is an interesting presentation from Pascal Brisset and Antoine Drouin of ENAC-CENA.
PaparaDzIY – MAV’s for Dummies Presentation
EMAV 04 Results
EMAV04 took place in Braunscheweig, Germany. With the ENAC Paparazzi team taking the first place with a Microjet (0.65cm, 0.4kg).
First Place at Ensica/Supaéro “journées microdrone”
ENAC’s Paparazzi team placed first in the Ensica/Supaéro “journées micro drone” in France. Here is the report from Antoine Drouin.
Hi folks.. Paparazzi has won first prize in the Ensica/Supaéro "journées microdrone" (http://www.ensica.fr/microdrone). It successfully completed the autonomous flight and was able to locate the target :) More details on the webpage asap. Regards, Antoine
Paparazzi V1.0
This article is based on the gallery on the original paparazzi savannah website.
The following pictures were taken between August 2003 and October 2003.
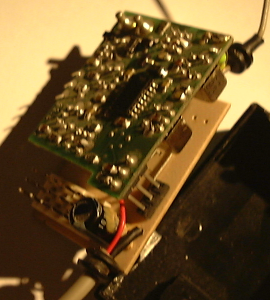
We had developed a flight controller board similar to the autopilot one. We had been able to re-use some of their code – for example radio control receiving or servos commanding. Thanks allot Trammel.
The plane now had the potential to become fully autonomous (not controlled from ground anymore).
We made some test with the autopilot inertial sensor (3 gyros, 3 accels) and discovered that it was not that easy to go from “tilt.c” to something that would work in our plane.
Out of despair, we plugged the FMA sensor to our controller board ADCs, wrote some cheap proportional controllers and … surprise, it worked very well.
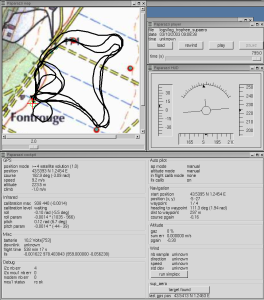
We worked on calibration (how to estimate attitude angles from temperature differences), and Pascal came out with a Linear Least Square method that gave good results. We observe the turn radius given by GPS. Under the coordinated turn hypothesis, we can convert it to bank angle that will be compared with the one obtained from infrared. The Linear Least Square algorithm will minimize this error.
This system was awarded first price for autonomous flight at the Ensica/Supaero second European MAV trophy in front of 4 international teams.
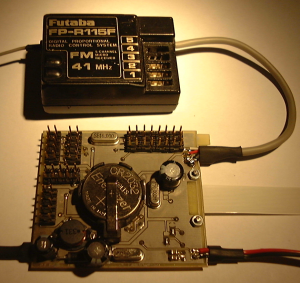
We had a bad surprise during this competition. A radio control interference disengaged the autopilot during the flight. I was able to reengage it and the flight continued with no other problem. We now filter the radio control signal on mode toggling channels and didn’t experience such phenomenon since. This is not satisfying. The only solution to be really sure would be to go PCM. Trouble is that radio control makers won’t publish their signal specifications. The Futaba PCM was more or less reverse engineered and we are thinking about buying a transmitter from that brand.
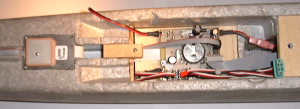
The airframe was still a twinstar. It was loaded with several packs of batteries – was very heavy and had a small flight endurance.
We have mounted the autopilot in a maxi-kiool, an enlarged version of the minus-kiool. This plane was light and flew long and well. It had a brushless motor and lipos batteries. This high priced gear had been offered to us by the Pyrénées Modèles shop in Toulouse. Thank you Mr Garat. Saint IGNUcius will give it back to you 🙂
We stopped using it because it was very fragile. The 56g version had no trouble landing on its motor but the 800g one didn’t like it very much. Another reason why we abandoned that plane is that Supaero regarded the design as his and intended to use it for competitions were we would be opposed. They made a high tech carbon/kevlar molded version which they measured in their wind tunnel. I’m not aware that this plane is regularly flying.
After the trophy, we were contacted by people wishing to use Paparazzi. We took conscience that our code was not configurable and would cause problem to port to another airframe.
We began to rewrite it to support an high level configuration language.