 Looking for a small, light and cheap ground station? Paparazzi runs on the ASUS eeePC out of the box (after installing the Debian Paparazzi packages). Tested on the pre-installed Xandros distribution, on a standard Ubuntu and on the preconfigured eeeXubuntu.
Looking for a small, light and cheap ground station? Paparazzi runs on the ASUS eeePC out of the box (after installing the Debian Paparazzi packages). Tested on the pre-installed Xandros distribution, on a standard Ubuntu and on the preconfigured eeeXubuntu.
Paparazzi Featured on Turkish TV
 Storm on TV, a Paparazzi aircraft was featured on the biggest Television station in Turkey. (Sorry, the audio is only in Turkish…)
Storm on TV, a Paparazzi aircraft was featured on the biggest Television station in Turkey. (Sorry, the audio is only in Turkish…)
Flying Aircraft over Internet
 From the 24C3 conference, Paparazzi aircraft operated in Hildesheim, Germany and in Castagnac, France were remote controlled in real time by Martin and Antoine (the station in Istanbul, Turkey was lacking a security pilot). The three local ground control stations and the remote one in Berlin were connected to a central server (located in Germany). Video from the 2 aircraft was also visible from the conference room in real-time. It was the result of great team work and … a lot of fun. See media section for some press coverage. The session video is available as a torrent here in Matroska or MPEG-4 format and these are the presentation slides.
From the 24C3 conference, Paparazzi aircraft operated in Hildesheim, Germany and in Castagnac, France were remote controlled in real time by Martin and Antoine (the station in Istanbul, Turkey was lacking a security pilot). The three local ground control stations and the remote one in Berlin were connected to a central server (located in Germany). Video from the 2 aircraft was also visible from the conference room in real-time. It was the result of great team work and … a lot of fun. See media section for some press coverage. The session video is available as a torrent here in Matroska or MPEG-4 format and these are the presentation slides.
Tiny 2.1 Autopilot

MAV 07 Success
 MAV 07 was yet another great success for the project! Paparazzi teams took 1st, 3rd, 4th, and 5th places in the outdoor autonomous surveillance competition and were honored to share the 1st place award with the very well designed Micropilot-equipped 48cm Ping Wing from Linköping University in Sweden.
MAV 07 was yet another great success for the project! Paparazzi teams took 1st, 3rd, 4th, and 5th places in the outdoor autonomous surveillance competition and were honored to share the 1st place award with the very well designed Micropilot-equipped 48cm Ping Wing from Linköping University in Sweden.
The first Paparazzi helicopter, Twisted Logic proved that a passively stable helicopter could operate well in mild outdoor winds and also took 2nd place in the indoor competition, surpassed only by the “Father of passively stable helicopters”, world famous Petter Muren of Proxflyer and BladeRunner fame.
The team of Christian Lindenberg and (fake) Martin Müller also won the special award from the jury for it general performance and fair spirit.
MAV 07
 MAV 07 will be held in Toulouse, France (of course!) September 17-21, 2007. Expect to see lots of great Paparazzi systems kicking ass and taking names!
MAV 07 will be held in Toulouse, France (of course!) September 17-21, 2007. Expect to see lots of great Paparazzi systems kicking ass and taking names!
We Lost Dr. Paul MacCready
 Dr. Paul MacCready, legendary aeronautical engineer and founder of Aerovironment, died in his sleep at the age of 81. Many of us met him met him in 2005 at MAV05 in Germany but all of us are familiar with his incredible body of work ranging from the first human powered aircraft, to the GM Sunraycer electric car, and the world altitude record holding Helios. MacCready was a world champion sailplane pilot, holds a Cal Tech Ph.D. in aeronautics, has been granted 7 honorary degrees, and has contributed a total of 4 aircraft and one car to the permanent collection of the Smithsonian Institution. He founded Aerovironment in 1971, the world’s largest supplier of hand-launched UAVs.
Dr. Paul MacCready, legendary aeronautical engineer and founder of Aerovironment, died in his sleep at the age of 81. Many of us met him met him in 2005 at MAV05 in Germany but all of us are familiar with his incredible body of work ranging from the first human powered aircraft, to the GM Sunraycer electric car, and the world altitude record holding Helios. MacCready was a world champion sailplane pilot, holds a Cal Tech Ph.D. in aeronautics, has been granted 7 honorary degrees, and has contributed a total of 4 aircraft and one car to the permanent collection of the Smithsonian Institution. He founded Aerovironment in 1971, the world’s largest supplier of hand-launched UAVs.
Flohof measurement campaign
 Three Paparazzi equipped Funjets were part of the Flohof measurement campaign around the Hofsjökull glacier in Iceland. We were able to measure temperature, humidity, pressure and estimate the wind. The authorities issued a NOTAM, clearing the airspace up to 12.000 feet which allowed us to set a new Paparazzi altitude record.
Three Paparazzi equipped Funjets were part of the Flohof measurement campaign around the Hofsjökull glacier in Iceland. We were able to measure temperature, humidity, pressure and estimate the wind. The authorities issued a NOTAM, clearing the airspace up to 12.000 feet which allowed us to set a new Paparazzi altitude record.
Spring flights
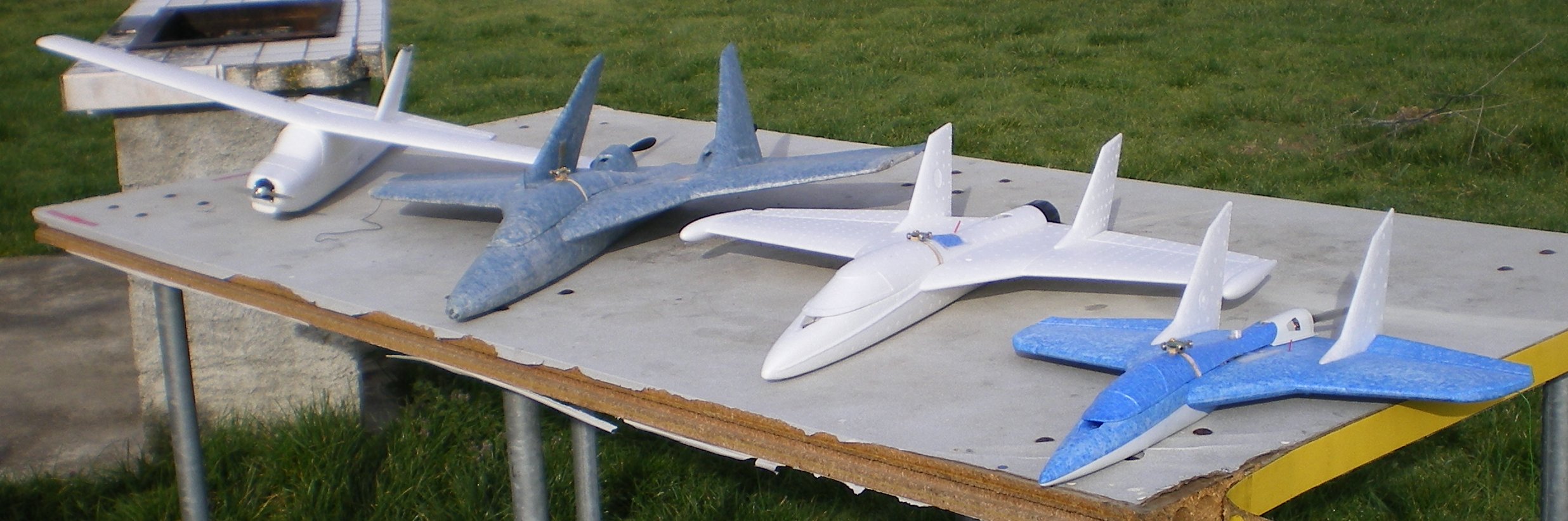 The sun is finally back. We took all of these babies for multiple aircraft flights. From left to right : 600g minimag, 900g twinjet, 600g funjet and 350g microjet. It’s such a shame that multiplex stoped producing microjets….. they didn’t even ask us 🙁
The sun is finally back. We took all of these babies for multiple aircraft flights. From left to right : 600g minimag, 900g twinjet, 600g funjet and 350g microjet. It’s such a shame that multiplex stoped producing microjets….. they didn’t even ask us 🙁
Antenna Tracker
![]() Jeremie Vacher, a student at ENAC, has developed a tracker for antennas. It is functional but still needs a little bit of polishing. Anybody interested?
Jeremie Vacher, a student at ENAC, has developed a tracker for antennas. It is functional but still needs a little bit of polishing. Anybody interested?