Researchers from the GMEI/MNPCA have recently returned from a one month field measurement campaign at the weather
Researchers from the GMEI/MNPCA have recently returned from a one month field measurement campaign at the weather
station of Mace Head in Ireland.
Their report was very positive with more than forty scientific flights, up to 3350m above sea level, some of them synchronized with a
meteorological satellite overpass, for the study of interactions between clouds and aerosols.
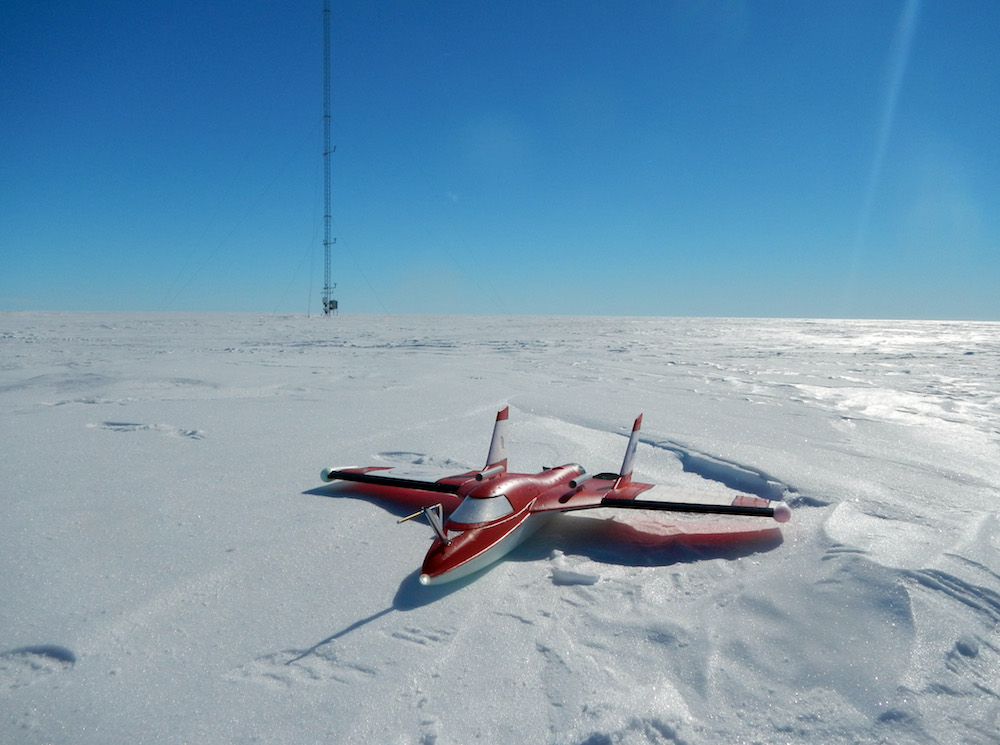
Several unmanned aircraft, equipped with the Paparazzi UAV
systems, have been used, carrying meteorological, aerosol, cloud and 3D wind sensors.
A bungee was used for taking-off, while a big net was needed in
order to recover the planes, since the ground was not suitable for traditional landings.
This campaign was part of the BACCHUS project (Impact of
Biogenic versus Anthropogenic emissions on Clouds and Climate: towards a Holistic UnderStanding).