![]() We are now part of the Gitter.im beta. Join our paparazzi/discuss channel. And live chat with the community!
We are now part of the Gitter.im beta. Join our paparazzi/discuss channel. And live chat with the community!
Category Archives: Community
Paparazzi on Android
![]() The Android application PPRZonDroid, a GCS extension for Android devices that you can use to control Paparazzi aircraft, is now available on Google Play.
The Android application PPRZonDroid, a GCS extension for Android devices that you can use to control Paparazzi aircraft, is now available on Google Play.
Drones 101 Series on HAK5 – Episodes 1-7
Piotr Esden-Tempski of 1Bit Squared is working together with Darren Kitchen of HAK5 on a series about Open Source Drones, explaining what Drones/UAV/UAS are, how to build, operate, program, and calibrate them. This series highlights Paparazzi’s hardware and software systems and their strengths.
Here is the first episode in the series titled, Drones 101- Hak5 episode 1611. In this episode Piotr and Darren build an Open-Source autonomous aerial system.
Drones 101- Hak5 episode 1612. In episode 2, Piotr and Darren discuss drone basics. How they are put together, what are their components, how they operate and what makes them special.
Drones 101- Hak5 episode 1615. In episode 3, Piotr and Darren discuss how flight controllers work. Microcontrollers, sensors, input and actuators are explained. You will also see Paparazzi’s Lisa/S and Lisa/M among other autopilots discussed.
Drones 101- Hak5 episode 1616. In episode 4, Piotr and Darren discuss the initial configuration and set up of the Lisa/M Open-Source Paparazzi autopilot. They also look at the Paparazzi control center software and ground station. Demonstrating how to compile, upload and test your first autopilot firmware.
Drones 101- Hak5 episode 1617. In episode 5, Piotr and Darren assemble the Bumblebee quadcopter frame. With live construction and step by step commentary. And finally test fitting of the Paparazzi Lisa/M autopilot.
Drones 101- Hak5 episode 1618. In episode 6, Piotr and Darren show how to wire a Paparazzi UAV autopilot into a quadcopter, using the Lisa/M and Bumblebee airframe.
Drones 101- Hak5 episode 1619. In episode 7, Piotr and Darren go through a Paparazzi UAS airframe bring-up process. Including the calibration of the IMU sensors, telemetry and ground segment architecture and much more. If you want to learn more about the Paparazzi UAV framework this episode has a lot to offer.

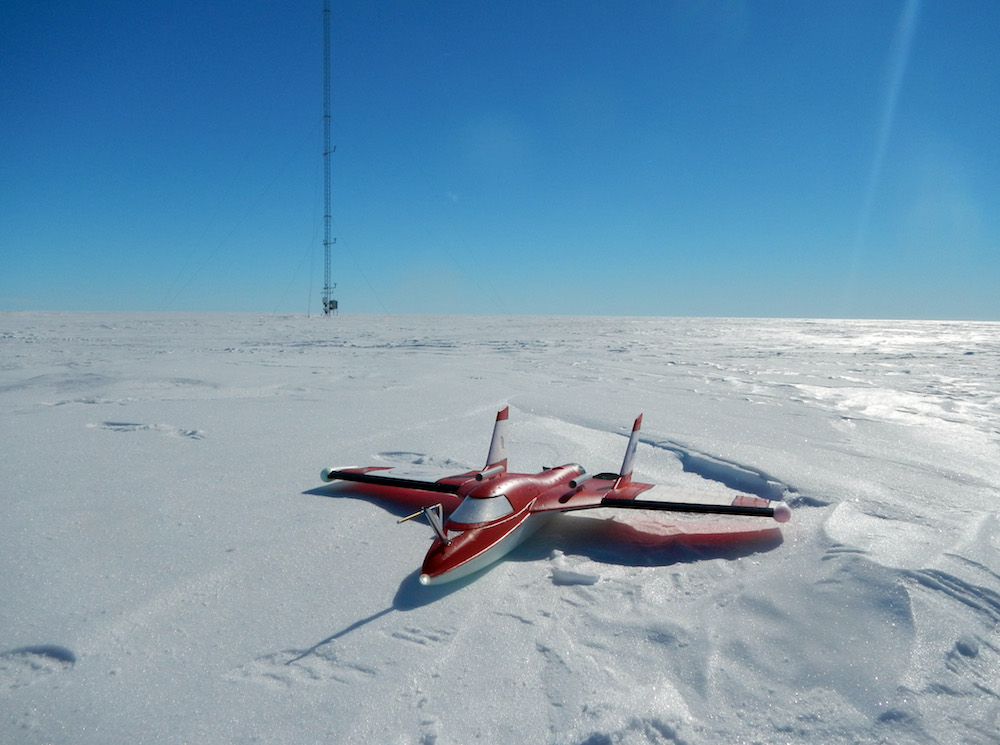
Paparazzi SUMO in Remote Antarctica
Paparazzi Wiki Update
![]() To make documenting and learning about Paparazzi easier we have updated the Wiki to the latest Mediawiki version (1.22). This new wiki provides a very improved search of the many articles, as well as video embed tags. You can easily embed a YouTube video into your article by writing {{#ev:youtubehd|videoID}}, or a Vimeo video by adding {{#ev:vimeo|videoID}}. The wiki is hosted on a new dedicated Paparazzi UAV server so it should be faster now aswell.
To make documenting and learning about Paparazzi easier we have updated the Wiki to the latest Mediawiki version (1.22). This new wiki provides a very improved search of the many articles, as well as video embed tags. You can easily embed a YouTube video into your article by writing {{#ev:youtubehd|videoID}}, or a Vimeo video by adding {{#ev:vimeo|videoID}}. The wiki is hosted on a new dedicated Paparazzi UAV server so it should be faster now aswell.
Paparazzi at 30C3
![]() The 30C3 – 30th Chaos Communication Congress was held in the Congress Center in Hamburg, Germany on December 27th-30th, 2013. We were present there as part of the Paparazzi UAV Assembly.
The 30C3 – 30th Chaos Communication Congress was held in the Congress Center in Hamburg, Germany on December 27th-30th, 2013. We were present there as part of the Paparazzi UAV Assembly.
Piotr Esden-Tempski of 1BitSquared made a presentation on Paparazzi’s History in the main events hall during the congress.
‘A drone inside everybody’s pocket’
Bart Remes of TU-Delft MAVLab speaking at TEDxAmsterdam. The topic, ‘A drone inside everybody’s pocket’. Bart demonstrates the ease of flight with a Paparazzi Lisa/S autopilot powered nano quadrocopter.

IMAV 2013
 The MavLab team of TU Delft consisted of 12 people coming from aerospace, computer science, embedded programming and artificial intelligence. Thanks to the enormous team efforts in the last months, the team has won prizes in all the categories in which it participated at IMAV 2013 in Toulouse, France:
The MavLab team of TU Delft consisted of 12 people coming from aerospace, computer science, embedded programming and artificial intelligence. Thanks to the enormous team efforts in the last months, the team has won prizes in all the categories in which it participated at IMAV 2013 in Toulouse, France:
Outdoor: 1st place
With an autonomous swarm of 12 MAVs operated by a single operator. The MAVs only had to be plugged in and started with their own flight plan, while the operator could monitor their mission status and intervene where necessary. Our participation featured four main innovations: (1) a single operator for 12 MAVs, 3 hybrid UAVs, 7 Parrot AR drones and 2 mini-quadrotors, (2) onboard vision processing on the AR drone with Paparazzi, (3) hybrid UAVs able to fly under any attitude, and (4) the world’s smallest open source autopilot, Lisa/S (2 grams). The wind conditions were terrible on the outdoor competition day, with 6 Bft, and most teams had their MAVs blown away. Everybody was impressed with how the hybrid UAVs were able to cope nicely with these conditions and were still able to perform a precision landing.
Indoor Operations: 1st place
Indoor Autonomy: 3rd place
Indoor the mission consisted of elements such as flying through a window and obstacle zone. We were the only participants to use a flapping wing MAV, which was in size and weight by far the smallest competing MAV (28 cm wing span, 20g). We demonstrated some autonomous flight capabilities such as autonomous takeoff (a world’s first), and the capabilities of the DelFly as a First Person View-platform, where the operator flies the MAV on the basis of its onboard images. All elements were performed by the operator. Many thanks to ENAC for organizing the event in Toulouse.
Lisa/S at TU-Delft
Our friends at the TU-Delft MAVLab have made a video showing Lisa/S flying on a Quadrocopter and Helicopter. In the video you can see the Paparazzi UAV software compiled for Lisa/S stabilize and control the aircraft. It is using the SuperbitRF module to receive control commands from a Spektrum RC transmitter. All the necessary software is integrated into the master software branch of Paparazzi.

Antarctica Meteo Missions 2013
 Over the last 9 weeks the Paparazzi autopilot has been used for operations with remotely piloted aircraft from the Finnish Meteorological Institute for scientific research on board the R.V. Polarstern in the Weddell Sea/Antarctica. You can see the course and read a short report on the homepage of the Alfred Wegener Institut.
Over the last 9 weeks the Paparazzi autopilot has been used for operations with remotely piloted aircraft from the Finnish Meteorological Institute for scientific research on board the R.V. Polarstern in the Weddell Sea/Antarctica. You can see the course and read a short report on the homepage of the Alfred Wegener Institut.
Instructions on how to build your own small unmanned meteorological observer (SUMO) can be found here in the Wiki.